
Fターム[2F062EE80]の内容
機械的手段の使用による測定装置 (14,257) | 測定方法 (2,962) | その他の測定方法 (7)
Fターム[2F062EE80]に分類される特許
1 - 7 / 7
ネジ孔検査方法およびネジ孔検査装置
【課題】簡易な手法によりネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができるネジ孔検査方法およびネジ孔検査装置を提供する。
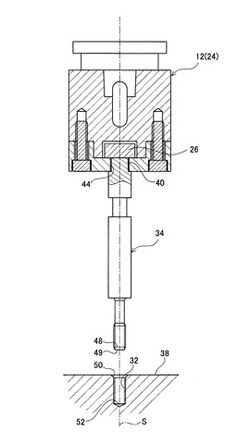
【解決手段】ネジゲージを用いてネジ孔32を検査するネジ孔検査方法において、ネジゲージがネジ孔32に螺合している状態で、ネジゲージと嵌合するアダプタ12の回転によりネジゲージを中心軸S方向に移動させるときに、中心軸S方向についてアダプタ12とネジゲージとの間に隙間を有し、隙間は、アダプタ12の1回転あたりの中心軸S方向の移動量がネジ孔32のピッチよりも小さい状態でネジゲージの先端部48をネジ孔32に螺合させて形成される。
(もっと読む)
ネジ孔検査方法およびネジ孔検査装置

【課題】簡易な手法によりネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができるネジ孔検査方法およびネジ孔検査装置を提供する。
【解決手段】ネジゲージを用いてネジ孔を検査するネジ孔検査方法において、ネジゲージがネジ孔に螺合している状態で、ネジゲージと嵌合するアダプタ12の回転によりネジゲージを中心軸方向に移動させるときに、当該中心軸方向についてアダプタ12とネジゲージとの間に隙間δを有する。
(もっと読む)
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
スタイラス摩耗検出方法および表面性状測定機
【課題】スタイラスの摩耗や欠損に対して、スタイラスの交換時期を適正に知らせることができるスタイラス摩耗検出方法および表面性状測定機を提供する。
【解決手段】表面に周期的に変化する凹凸が形成された標準片の表面に沿ってスタイラスをトレースしながら、そのトレース方向に対して交差する方向のスタイラスの変位を検出し、この変位から標準片の測定曲線を取得する測定曲線取得工程と、測定曲線に対して周波数解析を行う周波数解析工程と、この周波数解析工程で得られた周波数解析結果からスタイラスの摩耗量を演算する摩耗量演算工程と、この摩耗量演算工程で演算された摩耗量を表示する摩耗量表示工程と、を備える。
(もっと読む)
座標位置決め装置を用いて得られる測定値の誤差の補正
測定プローブ(18)を有する座標位置決め装置を操作する方法が記載される。方法は、一連の公称同一の部品の内の第一の部品(24)を選択する工程であって、少なくとも、第一の部品(24)の一つ以上の構造と関連する第一の基準幾何学的特性は知られている工程を含む。また、第一の部品(24)の一つ以上の構造を測定するために、座標位置決め装置を用い、そこから、第一の基準幾何学的特性に対応する、第一の測定幾何学的特性を決定する工程が実行される。それから、第一の基準幾何学的特性と第一測定幾何学的特性との間の差異を記述する、第一の特性補正値が決定される。座標位置決め装置は、それから、一連の公称同一の部品の内の一つ以上の他の部品の一つ以上の構造を測定するために用いられ、各々の他の部品に対して、第一の基準幾何学的特性に対応する、他の測定幾何学的特性が決定される。それから、第一の特性補正値が、各々の他の測定幾何学的特性に適用される。対応する座標位置決め装置が、また、記載される。 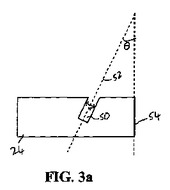 (もっと読む)
(もっと読む)
三次元測定機
【課題】被測定物の大きさに拘わらず、プローブの接触を確認しながら測定を実行することができる三次元測定機を提供する。
【解決手段】被測定物を載置するテーブルとプローブとを三次元方向へ相対移動させる相対移動機構13と、相対移動機構の駆動を指令する携帯可能な操作盤30と、操作盤からの指令に基づき相対移動機構を駆動させるとともに、プローブからの信号を取り込んで被測定物の形状を求める制御装置40とを備える。プローブの近傍にはカメラ20が取り付けられ、操作盤30には、表示部34と、カメラによって撮像された画像を表示部に表示する制御部38とが設けられている。
(もっと読む)
回転ベルトの緩み検知方法及び検知装置
【課題】回転ベルトの緩みの増大度を容易に確認することができる回転ベルトの緩み検知方法及び検知装置を提供する。
【解決手段】回転ベルト1の表面が一定期間摺接することによって切断される糸状の検知素子10と、検知素子10の一端に接続されると共に、垂下して配置される重り11とを準備する。検知素子10を、回転ベルト1の走行方向に直交する方向に配置すると共に、回転ベルト1の表面から所定の間隔をあけて配置する。回転ベルト1の緩みが増大すると、緩んだ回転ベルト1の表面が検知素子10に摺接するようになる。その後、回転ベルト1が一定期間摺接して検知素子10が切断されると、重り11が落下する。
(もっと読む)
1 - 7 / 7
[ Back to top ]