
Fターム[2F062GG62]の内容
機械的手段の使用による測定装置 (14,257) | 測定機器 (1,459) | 電気的な検出器 (248) | 歪センサ (30)
Fターム[2F062GG62]に分類される特許
21 - 30 / 30
ひずみ感知センサ
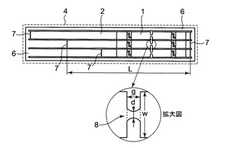
【課題】 測定対象部材に貼付して、稼働中の対象部材に生成したひずみが所定の大きさを越えたか否かを推定する小型で低廉なひずみ感知センサを供給する。
【解決手段】 薄膜基板4と少なくとも1対のひずみ伝達片2とセンサ箔1からなり、薄膜基板4は測定対象に貼付されて測定対象と共に歪むもので、ひずみ伝達片2は薄膜基板4上に形成されそれぞれ一端7が薄膜基板4に固定され、センサ箔1は断面積がひずみ伝達片2より小さい部分が対になったひずみ伝達片の間のギャップに渡されるように形成され、ひずみがセンサ箔1の限度を超えるとセンサ箔1が破断することにより、測定対象のひずみ履歴を推定する。
(もっと読む)
体の四肢の周方向の長さ変化を測定するための装置

【課題】迅速にかつ簡単に取扱い操作可能であり、かつ正確な測定値を確実に生じる、抵抗線ひずみゲージ式プレチスモグラフィ(ストレンゲージ式体積変動記録)に用いる体の四肢の周方向の長さ変化を測定するための装置を提供すること。
【解決手段】帯状の支持ベルトを備えた、体の四肢の周方向の長さ変化を測定するための装置において、支持ベルトを上から見た形が蛇行しており、当該支持ベルトが、縦方向に配置された短い部分と、横方向に配置された横方向部分からなり、横方向部分と短い部分が、支持ベルトを縦方向に引っ張ったときに弾性的に変形し、当該支持ベルトの長さがモジュール式の長さ要素によって決定可能であり、個々の支持ベルト要素が分離可能な継手によって相互作用しているよう構成する。
(もっと読む)
湾曲を測定するための測定装置
本発明は、長尺体(12)の湾曲(A)を測定する測定装置(10)に関する。測定装置(10)は、長尺体(12)が載置されるアンビル部材(14)と、測定装置(10)に含まれる駆動ユニットにより長尺体(12)の長軸線に沿って移動可能な測定集受部材(16)とを備え、該測定集受部材はプロセサ・ユニット(18)に接続されて測定値の処理を行う。更に、該測定装置(10)は、所定の力(F)を長尺体(12)に与える力伝達部材(20)を備えるが、ここでF≧0 N1である。測定集受部材(16)は、長尺体(12)の長軸線に当接するとともにそれに沿って移動しながら長尺体(12)と測定装置(10)の間の長さ(y)と高さ(x)を連続的に測定し、デジタル信号をプロセサ・ユニット(18)に供給して湾曲(A)を計算する。 (もっと読む)
寸法測定用プローブ
工作機械のような座標位置決め機械上の物体の寸法を測定するプローブは、ワークピース接触用針20を有する。これは、針がワークピースに接触すると、出力を提供する歪ゲージ34を含むセンサー機構30を介して吊り下げられている。プロセッサー16は、歪ゲージの出力を処理し、トリガー信号を発生させる。プロセッサーは、3次元X、Y、Zでのワークピースへの接近の全ての可能性のある方向において等しい感度を保証するアルゴリズムまたは計算式あるいはルックアップテーブルにしたがってそのように行う。  (もっと読む)
(もっと読む)
接触式変位測長器
【課題】接触式変位測長器による被測定物の計測において、正確で再現性のある計測結果を得ること。
【解決手段】第1の直線方向に往復移動が可能な第1の移動体2と、第1の移動体2を駆動する駆動部3と、第1の移動体2の移動に連動して第1の直線方向に平行な第2の直線方向に往復移動が可能な第2の移動体4と、第2の移動体4の先端に交換可能に取り付けられた測定子8と、測定子8が被測定物に当接した状態のときに被測定物に及ぼす測定力を第2の移動体4の後端において検出する測定力検出部9と、第2の移動体4の移動量を測定子8と測定力検出部9の間において検出する位置検出部10と、測定力検出部9の出力に応じて測定力を一定に保つように第1の移動体2の移動量を制御する制御装置300と、を備える。
(もっと読む)
測定プローブ
位置決定装置用のプローブは、プローブ本体(18)および加工対象物に接触するスタイラス(14)を有する。ひずみ感受性構造体は、プローブ本体およびスタイラスを接続し、そして、曲げられる部材(32)を含む。曲げられる部材は、例えば「T」形状の、非対称の横断面を有する。ひずみゲージ(33)は、スタイラスが加工対象物に接触するとき引き起こされる曲げを検出するように、「T」の細長い部分に取り付けられる。これは、ひずみ感受性構造体に、頑丈さと、曲げに対して感度が良いことの両方を可能にする。  (もっと読む)
(もっと読む)
多点測定装置
【課題】筒状部材内に緩衝部材を巻回した柱体を圧入して適切に保持し得る柱体保持装置の製造方法に好適な多点測定装置を提供する。
【解決手段】柱体2の外周に緩衝部材3を巻回した状態の被測定対象の回りに等間隔で、求心方向又は放射方向へ移動可能に、三つのスライダがベースBS上に配置される。これらのスライダに夫々固定されたホルダ70に三つのロードセル80が夫々固定され、これらのロードセルに三つの押圧体90が夫々固定される。各押圧体は少なくとも緩衝部材の軸方向長さに相当する長さを有し、三つの押圧体を同時に同量だけ移動するように制御する。
(もっと読む)
座標測定機械用プローブヘッド
【課題】小型化された探針と膜状センサーシステムとを備えた構造的ユニットの交換が単純化され、操作の高い信頼性を維持して実行できるようにする。
【解決手段】交換可能で小型化された探針108を有する座標測定機械のためのプローブヘッド。前記探針108は剛性があり、かつ前記探針108に力が作用したときに所定の仕方で撓むことのできる膜状センサーシステム100と共に構造的ユニット116を形成している。前記構造的ユニット116はプローブホルダー70に恒久的に結合されており、また前記探針108を交換する際に前記プローブホルダー70と一緒に取り扱うことができる。更に前記センサーシステム100は、たわみを検出するための電気的センサー要素114を有することができる。前記構造的ユニット116を前記プローブヘッド上に機械的に固定し、また前記センサー要素114と電気的に接続するために、別々の手段が備えられる。  (もっと読む)
(もっと読む)
触知三次元座標測定機の検出ヘッド用センサーモジュール
【課題】連続的測定過程をより簡単に、かつより正確に実施することができるようなセンサーモジュールを提供する。
【解決手段】触知三次元座標測定機の検出ヘッド用センサーモジュールには、固定されたモジュール基部を形成し、それによって最初の測定面60を規定するフレーム42を有している。移動部44は、ウェブ46によってフレーム42に接続されている。本発明の一局面によれば、各ウェブ46には、最初の測定面60に対して垂直な断面で見た場合、2つの薄い材料のウェブ部分52、54の間に配置された厚い材料のウェブ部分50がある。厚い材料のウェブ部分50は、薄い材料のウェブ部分52、54の対応する材料厚さdsより大きい材料厚さDsを有している。
(もっと読む)
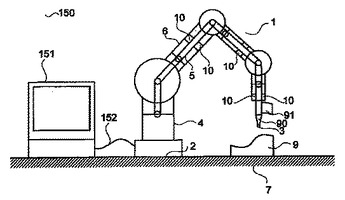
外骨格を有するCMMアーム
ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
 (もっと読む)
(もっと読む)
21 - 30 / 30
[ Back to top ]