
Fターム[2F063DB01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定対象物の走査 (164) | 一定物理量離して走査するもの (5)
Fターム[2F063DB01]に分類される特許
1 - 5 / 5
膜厚計測装置及び方法
【課題】精度良く、シリンダライナとピストンとの間における油膜の膜厚を計測することのできる膜厚計測装置を提供する。
【解決手段】ピストンにおけるピストンリング摺動面とシリンダライナの壁面との間の膜厚については静電容量方式により計測された膜厚データを選択し、ピストンにおけるピストンリング摺動面とシリンダライナの壁面との間以外のピストンの壁面とシリンダライナの壁面との間の膜厚についてはレーザ誘起蛍光法により計測された膜厚データを選択する。そして、選択した膜厚データを記録する。
(もっと読む)
位置検知装置

【課題】 磁石とこの磁石に対向して移動する検知器を用いて、位置検知を正確にできるようにした磁気抵抗効果素子を用いた位置検知装置を提供する。
【解決手段】 磁石2の円形の表面2aがN極に着磁され、背面2bがS極に着磁されている。検知器10は、磁石2の表面2aから離れた位置でX−Y平面内で移動する。検知器10内にはX方向検知素子20xとY方向検知素子20yが設けられている。X方向検知素子20xとY方向検知素子20yは、それぞれ磁気抵抗効果素子である。磁石2の表面2aを中心Oが突出するテーパ形状とすることにより、X方向検知素子20xとY方向検知素子20yとで、中心Oからの距離を正確に得ることができる。
(もっと読む)
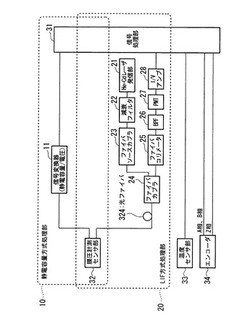
厚さ測定装置
【課題】周囲雑音、温度、測定対象物の寸法および表面状態等の影響を受けずに、定常運転状態で測定を行うことができると共に、非接触で走査し厚さの分布を連続的に検知することができる厚さ測定装置を提供する。
【解決手段】 厚さ測定装置100は、センサ11と、センサ保持手段12と、センサ移動手段13と、固定部材14、制御手段15と、表示部16から構成され、一次側の励磁コイルと二次側の誘導コイルを同軸に一体形成したもので、センサ移動手段13は、ネジシャフト13a,サーボモータ13b,軸受13cから構成され、制御部15からの制御信号によりサーボモータ13bがネジシャフト13aを回転させることで、センサ保持手段12を所定速度で所定方向に移動させるようになされている。
(もっと読む)
表面変位測定方法及びこれに用いる表面変位測定装置
【課題】 人体支持・被覆体及び人体の間に簡易な部材を介在させた状態で、人体支持・被覆体表面の変位又はこの人体支持・被覆体表面に接触する人体表面の変位を測定する表面変位測定方法及び表面変位測定装置を提供すること。
【解決手段】
人体を支持する人体支持体及び/又は人体を被覆する人体被覆体である人体支持・被覆体の表面の変位を測定する。変形可能な被検出体50を人体支持・被覆体表面100に沿わせ、人体支持・被覆体100裏面側に被検出体50を検出するセンサ5とこのセンサを用いて走査するスキャナとを設け、スキャナによりセンサで被検出体を走査し、人体支持・被覆体の表面の変位を測定する。変形可能な被検出体を人体表面に沿わせ、人体支持・被覆体裏面側に被検出体を検出するセンサを設けても良い。
(もっと読む)
部分硬化加工物の軟質ゾーン領域の幅を定量的に決定する方法
本発明は、少なくとも1つの硬化領域(2)および少なくとも1つの未硬化領域(3)を有する部分硬化金属加工物(1)の軟質ゾーン領域(3)の長さを、少なくとも1つの多周波渦電流センサ(4)によって、定量的に決定する方法に関する。加工物が、いつも分離されながら、多周波渦電流センサ(4)に対して移動され、それによって多周波渦電流センサ(4)で生成された渦電流場が空間的に範囲を定められて加工物(1)と無接触に相互作用し、加工物(1)に渦電流を引き起こし、この渦電流が、今度は、多周波渦電流センサ(4)に測定信号を生成し、それによって、空間的に範囲を定められた渦電流場が、加工物表面に対して長手方向に向けられかつ加工物表面に沿った軟質ゾーン領域(3)の最大延長(6)よりも大きな最も大きな延長部分を有していることを、本発明は特徴とする。さらに、n個の加工物の数が較正目的のために測定され、それによって、軟質ゾーン幅の所定の標準的な大きさ、すなわち加工物表面に対して長手方向に向けられた軟質ゾーン領域の延長部分の特定の大きさを想定して、n個の加工物の測定信号が、較正曲線を作るために使用される。最後に、較正曲線を基礎として利用しながら、絶対軟質ゾーン幅(b)は、各個々の加工物(1)から得られた測定信号に対応付けられる。 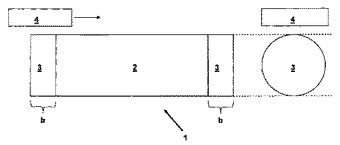 (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]