
Fターム[2F065DD19]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 原点又は基準点の検出 (236)
Fターム[2F065DD19]に分類される特許
121 - 140 / 236
作業装置及びその校正方法
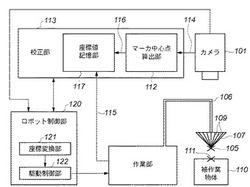
【課題】画像計測時にマーカの中心部を含む部分が遮蔽されていても作業部の位置の校正を行うことを可能とする。
【解決手段】作業装置は、被作業物体に対して作業を行う作業部と、マーカ中心点から放射状に複数のマーカが配置された校正治具とを有し、複数のマーカは、立体的に配置されており、校正治具は、作業部に対して設定された校正用の基準点とマーカ中心点とが一致するように作業部に装着されている。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法

【課題】 計測対象物体の位置及び姿勢の計測を、安定性と精度とを両立して行う為の技術を提供すること。
【解決手段】 センサ計測値入力部150は位置姿勢センサ140から撮像装置130の位置及び姿勢の計測値を取得する。画像入力部160は撮像装置130による撮像画像を取得する。指標検出部110は撮像画像に含まれている指標の画像座標を検出する。位置姿勢補正部120は、撮像画像に含まれている指標の現実空間中の位置を計測値に基づいて撮像画像上に投影した位置を推定画像座標として求める。そして、画像座標と推定画像座標との誤差から成る行列と、投影の為に用いた関数を用いて計算される画像ヤコビアンから成る行列と、計測値の補正量と、からなる連立方程式の逆問題を解くことで補正量を求める際には、正則化処理を伴う行列演算を利用する。
(もっと読む)
較正方法、移動体駆動方法及び装置、露光方法及び装置、パターン形成方法及び装置、並びにデバイス製造方法
【課題】計測方向が同じで設置位置の異なる2つの位置計測系を用いて移動体の位置を比較計測し、該計測結果に基づいて2つの位置計測系を較正して計測精度を統一する。
【解決手段】較正用Xヘッド660を、投影光学系PLとヘッドユニット62Dの間に設置する。ここで、Xヘッド660,664の離間距離を、他の隣接ヘッドの離間距離と等しく、且つ、Xヘッド660,665の離間距離を、Xスケール39X2,39X1の離間距離にほぼ等しく設定する。そして、ステージWSTをX軸方向に駆動して、そのX位置をXヘッド660,665を用いて比較計測し、それらの計測結果を一致させる較正データを作成する。この較正データを用いて較正することにより、ステージWSTのY位置に応じてXヘッド661〜664と665〜668を切り換えて使用する場合にも、等しい計測精度を維持することが可能となる。
(もっと読む)
空間内において少なくとも1つのオブジェクトを最終姿勢に高精度で位置決めするための方法およびシステム
本発明は、空間内において少なくとも1つのオブジェクトを最終位置に高精度で位置決めするための方法およびシステムに関する。オブジェクト(12)を産業用ロボット(11)によって把持公差以内で把持および保持する。前記産業用ロボット(11)の前記把持公差を補償する調整量を求める。前記オブジェクト(12)を高精度で最終姿勢に位置調整するため、該オブジェクト(12)が所定の公差以内で該最終姿勢に達するまで、以下のステップを繰り返し行う:撮像画像を光学的撮像装置(1a,1b)によって撮像するステップ。空間座標系における前記オブジェクト(12)の実際の姿勢を、前記光学的撮像装置(1a,1b)の位置(Pa,Pb)と、角度測定ユニット(4a,4b)によって検出された前記光学的撮像装置(1a,1b)のカメラ(2a,2b)の角度方向と、前記オブジェクト(12)における特徴的要素(13)の知識とから求めるステップ。前記調整量を使用して、前記産業用ロボット(11)の現在のポジショニングと、姿勢差に関連する量とから、該産業用ロボット(11)の新たな目標ポジショニングを決定するステップ。前記産業用ロボット(11)を前記新たな目標ポジショニングに位置調整するステップ。  (もっと読む)
(もっと読む)
絶対位置の計測装置及び計測方法
【課題】
原点位置を再現性良く設定可能な絶対位置の計測装置及び計測方法を提供する。
【解決手段】
第一の光源及びこれより干渉性の低い第二の光源を用いて被計測物の絶対位置を計測する計測装置であって、第一の光源及び第二の光源から得られる干渉信号の位相が一致する点、又は、第二の光源から得られる干渉信号の強度が最大となる点、を計測する計測部と、計測部により計測された点を原点位置として設定する原点設定部と、第一の光源から得られる干渉信号の原点位置における位相を記憶する位相記憶部と、原点位置の位置情報の消滅後に計測部により計測された計測結果と、第一の光源から得られる干渉信号と、位相記憶部に記憶された位相とを用いて原点位置を求め、原点を再設定する原点再設定部と、再設定された原点位置を基準として第一の光源からの光により生成される干渉信号を用いて被計測物の絶対位置を求める位置算出部と、を有する。
(もっと読む)
誤差補償付きオートフォーカスシステム
ワークピースの軸に沿った位置を測定するオートフォーカスシステムは、スリット光源アセンブリ、スリット検出器アセンブリ、及び制御系を含む。そのスリット光源アセンブリは、第1スリット光をワークピースの第1スリット領域に向ける。スリット検出器アセンブリは、第1スリット領域から反射した光を検出し、第1スリット領域から反射した光の量に関連する第1スリット信号をスリット検出器アセンブリにて生成する。制御系はスリット検出器アセンブリからの第1スリット信号と、第1スリット領域の第1反射情報を用いて前記軸に沿ったワークピースの位置を決定する。この設計により、オートフォーカスシステムはワークピースの反射率の変化を補償することができる。この結果、オートフォーカスシステムにより測定された測定はより正確で、ワークピースは向上した精度で位置付けられることができる。  (もっと読む)
(もっと読む)
ディスクリファイナの刃面間隙測定装置
【課題】 ディスクリファイナの磨砕刃の刃面間隔を測定するに際して、高精度に、定量的に測定することにより、作業員の熟練に頼らずに確実に測定でき、しかも、簡単な構造としたディスクリファイナの刃面間隙測定装置を提供する。
【解決手段】 主軸3の方向に摺動可能な摺動ディスク6に連繋させて、ターゲット22を設ける。このターゲット22にレーザー光線を入射し、該ターゲット22からの反射光を捕捉する測距センサー23を、ディスクリファイナのケーシング1等の不動の部分に設ける。測距センサー23から照射し、ターゲット22で反射したレーザー光線を該測距センサー23で捕捉することによりターゲット22までの距離を測定して摺動ディスク6までの距離を求め、磨砕刃4a、5a、6aの磨耗量を計測する。
(もっと読む)
キャリブレーション処理装置、およびキャリブレーション処理方法、並びにコンピュータ・プログラム
【課題】多視点画像撮影システムにおけるキャリブレーションを高精度にかつ効率的に実行する装置および方法を提供する。
【解決手段】キャリブレーション処理対象となるカメラにより、発光球体を異なる方向から撮影し、撮影画像フレームから球体中心位置を特徴点として抽出し、抽出した球体中心位置に基づく特徴点対応付けを実行し、特徴点対応付けデータに基づいてファンダメンタル(Fundamental)行列の算出を実行する。照明環境等に影響しにくい発光球体をキャリブレーション治具として用い、球体の中心位置をリアルタイムに検出し対応付けしながらF行列を推定し、推定されたF行列と対応点との誤差や位置関係などを評価することによって、必要となる対応点の数や三次元空間上に置くべき球体位置を指示し、より高精度なF行列を効率的に算出することが可能となる。
(もっと読む)
位置計測システム
【課題】対象物の位置や角度を簡易かつ高精度に測定することができる位置計測システムを提供する。
【解決手段】ターゲット10に配置された平面上の3つの基準マーカであって互いの位置関係が特定されている第1基準マーカ、およびこの平面から一定の距離にある1つの基準マーカであって第1基準マーカとの位置関係が特定されている第2基準マーカを撮影するカメラ20と、カメラ20により撮影された4つのマーカ画像の位置関係に基づき、第1基準マーカの画像と第2基準マーカの画像とを識別し、識別された第1基準マーカのマーカ画像および第2基準マーカのマーカ画像の位置関係に基づき、ターゲット10の三次元位置および三軸角度を演算する演算装置30とを備える。
(もっと読む)
基準値の経時変化シフト量の補正方法
【課題】基準値の経時変化シフト量を推定してその物理量決め補正値を求める基準値の経時変化シフト量の補正方法を提供する。
【解決手段】当初の基準位置A1〜A3をキャリブレーション手段を用いて決定すると同時にその時間T1〜T3を記録する工程と、ワークを所定期間又は所定の数量、当初の基準位置A1〜A3を基準として用いてアライメントを行うと共に、アライメント時間t1〜t7を記録する工程と、再びキャリブレーション手段を用いて最新の基準位置A2〜A4を決定すると同時にその時間T2〜T4を記録する工程と、当初の基準位置と最新の基準位置との差Δ1〜Δ3と両基準位置を決定した間の経過時間と、個々のアライメント時間とを用いて当初の基準位置からの、個々のワークのアライメント時の個々のシフト量Δ1−1〜Δ2−2を推定し、個々のワークのアライメント補正値とする。
(もっと読む)
物体の位置及び運動検出システム、及び方法
ライト(43)と協働する第1のカメラ(42)と、ライト(45)と協働する第2のカメラ(44)と、によって観察される第1の視野領域(40)を利用する、目標の場所及び運動を検出するためのシステム及び方法である。第1の視野領域(40)を包囲する視野領域(47)を観察するために、第3のカメラ(46)を追加することができる。第1のカメラ(42)は時空間点(51)及び(53)において第1の軌道ライン(55)に沿って画像を取得する。第2のカメラ(44)は時空間点(52)及び(54)において第2の軌道ライン(56)に沿って画像を取得する。この情報を組み合わせて、目標の3D軌道ライン(50)が生成される。 (もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】複数の検出領域を備えたアライメント系でウエハマークを検出するマーク検出方法であって、第1検出領域AL1fで検出した基準マークFMを、基準マークFMを備えたステージの位置情報を計測しつつ第2検出領域AL24fに移動して、第2検出領域AL24fで基準マークFMを検出し、検出領域AL1f,AL24fで基準マークFMを検出した結果と、位置計測装置からの位置情報とを用いて、検出領域AL1f,AL24fの相対位置情報を求めた後、検出領域AL1f,AL24fで実質的に同時に別の位置のウエハマークを検出する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】検出領域が異なる複数のアライメント系AL21〜AL24を用いてウエハW上の異なるウエハマークWMB,WMC,WMD,WMEを検出する工程と、ウエハWの位置情報を計測しながらウエハWを移動しつつ、ウエハマークWMB〜WMEを別のアライメント系AL1の検出領域に順次移動して、これらのマークを検出する工程と、アライメント系AL21〜AL24による検出結果とアライメント系AL1による検出結果とに基づいて、アライメント系AL21〜AL24による検出結果のオフセットを求める工程とを有する。
(もっと読む)
三次元座標系の設定方法および装置
【課題】測定値を表す座標系として複数の座標系を設定することができる装置に対し、複数の座標系を効率よく且つ精度よく設定する。
【解決手段】所定の空間に、ターゲットマーク93(第1マーク)を備えた較正チャート92と、外観上識別可能な基点マーク43(第2マーク)を備えたステレオカメラ1を配置する。ステレオカメラ1に接続された設定装置91からステレオカメラ1に較正値を入力し、自動較正機能により固有座標系の原点を較正する。設定装置91は、較正値、ターゲットマーク93の位置座標および基点マーク43の位置座標に基づいて、固有座標系における基点マーク43の位置座標を算出する。設定装置91は、算出した基点マーク43の位置座標を、固有座標系とは別の共通座標系の原点の位置座標として、ステレオカメラ1に記憶せしめる。
(もっと読む)
計測装置
【課題】オイルミストや塵などの付着から位置較正部材を保護して測定精度を得ることができ、加工機械のそばでも測定が行える計測装置を提供すること。
【解決手段】被検物Mの形状を測定する計測装置であって、前記被検物の形状情報を採取する検出部(形状センサ20)と、前記検出部の計測時における基準位置を示す位置較正部材(基準球30)と、前記位置較正部材をその周囲の雰囲気から隔てるための保護手段(格納庫31、エアーポンプ40)とを備える。
(もっと読む)
切削装置
【課題】簡単な構成で経済的なブレード検出手段を具備した切削装置を提供する。
【解決手段】被加工物を保持するチャックテーブル20と、該チャックテーブル20に保持された被加工物を切削する切削ブレード108,112を回転可能に支持する切削手段96,100と、X軸方向に加工送りするX軸送り手段と、Y軸送り手段と、Z軸方向に切削手段を切り込み送りするZ軸送り手段とを備えた切削装置であって、チャックテーブル20が移動するX軸移動経路を挟むようにレーザービームを照射するレーザービーム照射部116と該レーザービームを受光するレーザービーム受光部118とを配設して構成される切削ブレード検出手段114を備え、レーザービーム照射部116が照射するレーザービームは、Y軸方向に平行であるとともに、切削ブレード108,112の回転軸心を通るZ軸と交差する。
(もっと読む)
対象物の動きを捕捉するシステム及び方法
対象物の動きを捕捉するシステム及び方法において、追跡装置が使用され、追跡装置は、光学マーカと、追跡装置の位置及び向きを表わす動きデータを提供する動きセンサと、を有する。追跡装置は、対象物に接続され、光学マーカの動きは、カメラによって記録され、それにより追跡装置の位置を表わすビデオデータを提供する。動きデータ及びビデオデータは、ある時間期間にわたる追跡装置の空間的な位置及び向きを決定するために、組み合わせにおいて処理される。  (もっと読む)
(もっと読む)
センサ及びビデオ三角測量を共同使用する物体の検出
【課題】標的を検出・追跡する方法及び装置が提供される。
【解決手段】1以上のプラットホームに据え付けられた少なくとも2台のカメラ(10、12、14)によって、視界(16)から画像が捉えられる。これらの画像は分析され、標的位置をフレームからフレームに追跡するのに利用できる画像で標識を確認する。画像は、少なくとも1つのセンサから標的又はプラットホームの位置に関する情報を融合して(1つにまとめて)、標的を検出・追跡する。プラットホームの位置に対する標的位置が表示されるか、あるいは標的に対するプラットホームの位置が表示される。
(もっと読む)
ウェブの位置を表示するためのシステム及び方法
可撓性ウェブの変位を表示するための方法及びシステムについて記載する。細長い可撓性ウェブは、目盛り構造を有する一体的な目盛りを含み、その目盛り構造は、ウェブに向けられたエネルギーを変調するように構成される。移送構造は、ウェブと変換器との相対運動をもたらす。変換器は、目盛り構造によって変調されたエネルギーを検知し、変調されたエネルギーに基づいて連続的なウェブの変位を表示する信号を生成する。  (もっと読む)
(もっと読む)
121 - 140 / 236
[ Back to top ]