
Fターム[2F065DD19]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 原点又は基準点の検出 (236)
Fターム[2F065DD19]に分類される特許
81 - 100 / 236
露光装置及び露光方法、並びにデバイス製造方法
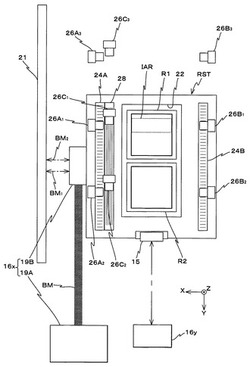
【課題】移動体を精度良く駆動する。
【解決手段】 移動体RSTのY軸方向の位置情報を、干渉計16yと、該干渉計に比べて計測値の短期安定性が優れるエンコーダ((24A,26A1)、(24B,26B1))とを用いて計測し、その計測結果に基づいてエンコーダの計測値を補正する補正情報を取得するための所定の較正動作を実行する。これにより、干渉計の計測値を用いて、その干渉計に比べて計測値の短期安定性が優れるエンコーダの計測値を補正する補正情報が取得される。そして、エンコーダの計測値と前記補正情報とに基づいて、移動体をY軸方向に精度良く駆動する。
(もっと読む)
画像プローブの校正方法および形状測定機

【課題】画像プローブの校正方法を提供すること。
【解決手段】画像プローブ3の撮像方向を垂直にした状態で画像プローブ3および各測定子611A,611Bによりそれぞれ校正ゲージ62を測定し、画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係を求める。次に、一方の測定子611A,611Bにより基準球63を測定し、基準球63の位置を登録する。続いて、画像プローブ3の撮像方向を傾斜させた後、各測定子611A,611Bで基準球63を測定し、該測定結果と登録した基準球63の位置とから測定機1上の各測定子611A,611Bの位置を求める。画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係は既に取得しているので、求めた測定機1上の各測定子611A,611Bの位置から画像プローブ3の光軸周りの回転角度および画像プローブ3の位置を校正できる。
(もっと読む)
三次元形状測定方法および装置
【課題】三次元形状測定方法および装置において、例えば、ハレーション等の被測定物の表面の反射特性による反射光のノイズ成分を低減し、被測定物の表面の測定不能域を低減することができるようにする。
【解決手段】三次元形状測定装置100は、被測定物1にパターン光12bを投影するプロジェクタ2と、パターン光12bが投影された被測定物1を撮像して、被測定物1の表面からの反射光画像を取得するCCDカメラ3と、反射光画像から被測定物1の三次元形状を算出する演算部4と、被測定物1とCCDカメラ3との間に配置された偏光フィルタ9と、プロジェクタ2と被測定物1との間に配置された偏光フィルタ7とを備え、偏光フィルタ7、9は、透過軸の方向を調整可能に設けられている。
(もっと読む)
交換可能なクロマティックポイントセンサ構成要素の強度補償
【課題】交換可能なクロマティックポイントセンサ構成要素の強度補償を提供する。
【解決手段】クロマティックポイントセンサ(CPS)の光源および波長検出器サブシステムの非均一応答に補償を提供する方法が提供される。光源からの光は、CPS光学ペンを通る測定路を迂回し、迂回光を波長検出器に提供して、検出器のピクセルにわたって分布した未処理強度プロファイルを提供する光路に入力される。結果として生成される未処理強度プロファイル信号のセットが解析されて、未処理強度プロファイル信号内に発生する波長依存強度変動の誤差補償係数のセットが決定される。後に、誤差補償係数を適用して、本発明を使用しない場合にはCPS距離測定プロファイル信号データのピーク領域内の信号の形状に発生する歪みおよび非対称性を低減することができる。開示される方法は、様々な実施形態において、CPS構成要素に強化された精度、ロバスト性、現場でのテスト、および交換可能性を提供することができる。
(もっと読む)
計測装置
【課題】固定のセンサに対してテーブルが動作する計測装置において、ワークの形状を正確に計測することができる計測装置を提供する。
【解決手段】本発明は、レーザーによるスリット光を照射する光源21及びスリット光によって生じる光切断線を撮像する撮像部22を有するセンサ2と、予め設定された計測開始位置に配置されてスリット光を受ける受光表面31aにワークWを把持し、計測開始後に所定動作をするテーブル31と、撮像部22の撮像データを位置データに変換してワークの形状を計測する計測部4と、計測部4に対し、受光表面31aのずれを検出可能な位置情報を提供するずれ検出部52と、を備え、計測部4は、位置情報に基づいてずれを検出し、ずれが検出された場合、当該ずれに応じて位置データを補正して、ワークの形状を計測することを特徴とする。
(もっと読む)
測定装置、露光装置及びデバイスの製造方法
【課題】スケールの位置が基準位置からずれている場合であっても、被測定体(例えば、ステージ)の位置を高精度に測定することができる測定装置を提供する。
【解決手段】いずれか一方が被測定体に設けられるスケール及びセンサを備え、前記スケールを前記センサで読み取ることで前記被測定体の位置を測定する測定装置であって、基準位置からの前記スケールのずれ量を検出する検出部と、前記検出部によって検出された前記基準位置からの前記スケールのずれ量に基づいて、前記スケールを前記センサで読み取ることで測定された前記被測定体の位置を補正する演算部と、を有することを特徴とする測定装置を提供する。
(もっと読む)
3次元形状測定方法
【課題】測定作業の生産性を向上した3次元形状測定方法を提供すること。
【解決手段】ベアボードを測定位置に移送し、ベアボードに第1パターンプロジェクターの格子をN回移送させながら第1方向に第1格子パターン照明を照射し、ベアボードに照射された第1格子パターン照明に対応するN個の格子パターン映像を撮影し、パッドの第1高さ位相を算出し、ベアボードに第2パターンプロジェクターの格子をN回移送させながら第1方向とは異なる第2方向に第2格子パターン照明を照射し、ベアボードに照射された第2格子パターン照明に対応するN個の格子パターン映像を撮影し、パッドの第2高さ位相を算出し、算出されたパッドの第1高さ位相及び第2高さ位相を用いて基準面を算出して貯蔵し、ソルダが形成されたパッドを有するボードを測定位置に移送し、同様のプロセスを行うことによって基準面に対する相対的なソルダの高さを算出する。
(もっと読む)
校正用データ取得装置およびその方法
【課題】 広い領域のステレオ撮影に必要な複数のカメラを設置する際に、容易にキャリブレーションを実行する技術を提供する。
【解決手段】 所定の空間領域(50)に対して異なる方向から撮影する二台のカメラと、その二台のカメラの撮影タイミングを制御する撮影制御装置と、前記所定の空間領域内を移動可能な被写体(たとえばラジコンヘリコプタ31)とを備える。 前記被写体(30)は、三次元の位置座標を取得可能なGPS装置(32)を搭載し、 前記撮影制御装置は、所定の空間領域(50)内の被写体(30)を前記二台のカメラ(11L,11R)にて撮影して画像データを取得する。
(もっと読む)
リンクコンベアチェーンの伸び測定装置
【課題】センサの設置が簡単であるとともに、伸び量の測定精度を高めることができるリンクコンベアチェーンの伸び測定装置を提供することを課題とする。
【解決手段】センタリンク2とサイドリンク3とが交互に連結されたリンクコンベアチェーン1の伸び測定装置10であって、センタリンク2の特定部位を検出する基準センサ20と、この基準センサ20が特定部位を検出したときに、前後に配置された二体のセンタリンク2,2に一方から光を照射し、二体のセンタリンク2,2の間から他方に通過した光を受光する幅センサ30と、予め設定された基準の受光量と幅センサ30が検出した受光量との誤差量を算出する制御装置40と、を備えている。
(もっと読む)
カメラ校正装置、カメラ校正方法、カメラ校正プログラムおよびそのプログラムを記録した記録媒体
【課題】カメラを簡単に校正することができるカメラ校正装置を提供する。
【解決手段】 校正対象のカメラ102を使って参照点の幾何情報が既知である参照物体を撮影して取得した画像において所定の2次元座標系を設定し、用意された参照点の2次元座標値を抽出する参照点調整部104および参照点測定部105を設け、参照物体調整部104によって、前記得られた参照点の中で、一部の参照点が特定の幾何拘束条件を満足するまで参照物体の姿勢または位置を調整し、前記調整された参照物体に対して、参照物体上の全ての参照点の3次元点が画像上の2次元座標系へ射影するときの透視投影条件から導出された計算に従って、参照点の幾何情報と2次元座標上で得た参照点の座標値から、前記カメラ102の内部情報または外部情報を校正するカメラ校正処理部106を設ける。
(もっと読む)
車輪形状測定装置
【課題】鉄道車両用車輪の踏面部及びフランジ部の形状や、車輪直径、フランジ高さ、フランジ厚さ、左右車輪間隔の距離等の車輪寸法を迅速、正確に計測する車輪形状測定装置を提供する。
【解決手段】車両が走行する線路近傍に、車輪が計測位置に到達したことを検出する車輪計測位置検出センサー、該センサーの信号をトリガーとし車輪の内側からフランジ部と基準溝に向けて帯状の広がりを有するレーザー光を照射して車輪の半径方向の形状測定を行う内側面レーザー変位計及び前記センサーの信号をトリガーとし車輪の外側から踏面部とフランジ部に向けて帯状の広がりを有するレーザー光を照射して車輪の半径方向の形状測定を行う踏面レーザー変位計を設けると共に、前記2つのレーザー変位計により形状測定されたデータを受信し補正処理を行い記録保存する計算機部を有してなる車輪形状測定装置。
(もっと読む)
カメラの自動キャリブレーション装置及び自動キャリブレーション方法
【課題】本発明は、カメラの自動キャリブレーション装置及び自動キャリブレーション方法に係り、カメラの位置や向きのズレに起因する撮影画像の画像処理時の計測誤差の発生を防止することにある。
【解決手段】撮影対象として所定基準面を基準にして面対称な特徴点の組を複数有する面対称物体を含むカメラの撮影画像から、面対称物体の面対称特徴点の少なくとも2組を抽出し、その抽出される面対称物体の面対称特徴点の少なくとも2組に基づいて、所定基準面を特定する基準面パラメータ、及び、該面対称物体の面対称特徴点の少なくとも2組を含む面対称構成平面を特定する構成面パラメータを導出する。そして、その導出される基準面パラメータ及び構成面パラメータに基づいて、撮影対象とカメラとの座標系の対応を示す回転パラメータ及び並進パラメータを更新する。
(もっと読む)
変位測定装置及び変位測定方法
【課題】
高精度な変位測定装置を提供する。
【解決手段】
被測定物1の変位量を測定する変位測定装置100であって、ベース2までの距離に基づいて第一の原点位置を検出する測距センサー5と、被測定物1までの距離に基づいて第二の原点位置を検出する測距センサー6と、測距センサー5、6を搭載して測距センサー5、6の測距方向に移動するステージ4と、測距センサー5、6を移動させて検出された第一の原点位置及び第二の原点位置を利用して、ベース2に対する被測定物1の変位量を測定するコントローラ7とを有する。
(もっと読む)
調整方法
【課題】干渉計の原点の検出に関して、光源からの光の波長が変化した場合にも(実環境においても)高い再現性を実現できる。
【解決手段】第1の波長の第1光源からの光による第1の干渉信号と第2の波長の第2光源からの光による第2の干渉信号との位相差が0となる位置を原点とする干渉計の調整方法であって、前記第1の波長がλ1、前記第2の波長がλ2である場合における原点に対する前記第2の干渉信号の振幅が最大となる位置の相対位置Dを求めて、パラメータの値PをP=D/λ2(λ2−λ1)の式に従って算出し、このパラメータの値Pに基づいて、前記第1の波長がλ1からλ1’、前記第2の波長がλ2からλ2’に変化した場合における前記原点の移動量BをB=P・(λ1’・λ2’−λ1・λ2)の式に従って算出し、この原点の移動量Bに基づいて、前記第1の波長がλ1’、前記第2の波長がλ2’である場合における原点を決定する調整方法。
(もっと読む)
可変コンデンサの機械的位置検出方法
【課題】可変コンデンサの動作制御の基準となる前記コンデンサのシャフト回転の原点を正確に且つコンデンサにストレスを与えることなく検出する。
【解決手段】可変コンデンサのシャフト回転の原点出し指令時に前記シャフトを回転させるモータを逆転させて限界位置まで前記モータを停止させ、正転指令時に前記モータを前記逆転時よりも低速で正転させて前記シャフトと同期回転するスリット板のスリットの幅を光照射式の検出手段によって検出し、この検出された幅に基づく位置を前記シャフト回転の原点として検出する。前記原点出し指令時には前記モータのトルクは原点出しに必要なトルクよりも大きい始動トルクが検出されてから前記原点出しに必要なトルクに切り替えられる。
(もっと読む)
ロボットのツール位置検出方法、ロボットと対象物との相対位置検出方法、及びそれらの装置
【課題】ツール位置やロボットと対象物との相対位置を簡単かつ高精度に検出する。
【解決手段】ロボット2のアーム7先端のツール取付部7eに球面部8aを有するツール8を取り付け、ツール取付部7eから球面部8aの中心までのツールベクトルの成分に未知数を設定し、球面部8aを平板16に対してツール8の姿勢を変えて少なくとも未知数の数と同じ回数当接させ、その当接時のロボット2のアーム7の関節角度に基づいて当接時のツール取付部7eの位置をそれぞれ求め、特定の座標系において、平板16のZ位置と球面部8aの曲率半径Rcとの和から得られる球面部8aの中心のZ位置が、ツール取付部7eのZ位置とツールベクトルのZ成分との和から得られる球面部8aの中心のZ位置に等しいことを意味する連立方程式を少なくとも未知数の数と同じ回数連立させ、その連立方程式を解くことでツールベクトルの成分を求める。
(もっと読む)
単一映像を利用した姿勢角センサー三次元誤整列補正方法
【課題】飛行体に装着された映像獲得カメラで撮影された単一映像情報から地上制御点を計算して姿勢角センサーの三次元誤整列情報を定量的に抽出して補正する単一映像を利用した姿勢角センサー三次元誤整列補正方法に関する。
【解決手段】地上制御点基準ベクターの計算段階と、映像情報を利用した地上制御点観測ベクターの計算段階と、計算された前記地上制御点基準ベクターと前記地上制御点観測ベクターを利用した姿勢誤差行列計算段階と、前記姿勢誤差行列計算値を利用した姿勢角センサー誤整列の補正段階とを含んで成り立つ。
(もっと読む)
3次元物体姿勢・位置検出装置、方法、およびプログラム
【課題】参照点等を与えることなく、3次元物体の位置(撮影したカメラから3次元物体の予め定められた点までの距離)を高精度に検出することを可能とした3次元物体姿勢・位置検出装置を提供することである。
【解決手段】提案する3次元物体姿勢・距離位置装置では、2次元画像の対象物中心点の位置を、その2次元画像と、その2次元画像の姿勢に加えた組み合わせとして作成した辞書データを記憶装置8内に有するために、事前に参照点や図形を辞書データの各2次元画像に入力することなく、また、ステレオカメラ16−1、16−2を用いることにより、認識対象の3次元姿勢および対象物中心点までの距離を容易に認識することができる。
(もっと読む)
光軸検出装置、光軸検出システム、ターゲット、光軸検出方法
【課題】画像を撮像する複数の撮像装置の光軸のずれを検出する光軸検出装置において、撮像装置の光軸方向のずれを効率よく検出できるようにすることを目的とする。
【解決手段】撮像装置の前方に配置された複数種類のターゲットを認識する認識手段と、上記ターゲットを認識した位置に基づいて光軸のずれを検出する検出手段と、を備え、上記認識手段は、上記撮像装置で撮像した撮像画像の画素のうちから、上記撮像画像の一部の画素集合を選択し、当該一部の画素集合内の画素の輝度に関する所定の和算および減算からなる演算に基づいて、当該演算の結果が最大値または最小値となる上記画素集合を探索する探索手段を複数種類備え、上記探索手段が探索した上記最大値または最小値に基づいて、上記ターゲットを認識する。
(もっと読む)
基準マーク移動装置及び基板アライメント装置
【課題】基板アライメント装置が緊急停止した場合に、マーク保持部が基板及び基板保持部と衝突することを防止する。
【解決手段】上ステージ部と下ステージ部とにより互いに面方向に相対移動されて位置合せされる一対のウエハに設けられたアライメントマークを撮像する上顕微鏡148と下顕微鏡150との視野内に、上顕微鏡148と下顕微鏡150とにより撮像される上顕微鏡148と下顕微鏡150との相対位置検出用の基準マーク146を出し入れする基準マーク移動装置100であって、基準マーク146を保持するボード144と、ボード144におけるマーク形成部分をウエハ及びウエハホルダの移動通路に出入りさせると共に、駆動が停止された場合に、ボード144の全体を移動通路の外部へ退避させる昇降装置102と、を備える。
(もっと読む)
81 - 100 / 236
[ Back to top ]