
Fターム[2F067BB21]の内容
波動性又は粒子性放射線を用いた測長装置 (9,092) | 対象物の形状、材質、種類 (682) | 対象物にマークを有するもの (32)
Fターム[2F067BB21]の下位に属するFターム
マーク形状 (3)
Fターム[2F067BB21]に分類される特許
21 - 29 / 29
配管肉厚測定装置及び配管肉厚測定方法
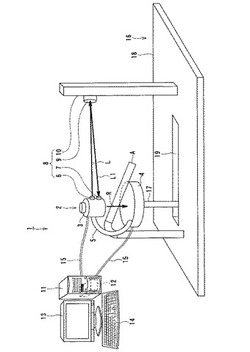
【課題】イメージインテンシファイアを用いて配管肉厚測定を行う方法において、被測定物である配管における測定位置の特定を可能にし、また、減肉量測定の精度を向上させる目的とする。
【解決手段】放射線Rを発生させる放射線発生装置3及び放射線発生装置3にて発生した放射線Rを入射し光に変換して前記光のイメージを増幅するイメージインテンシファイア4からなる放射線検査装置2と、放射線検査装置2の位置を検出する位置検出装置8とを設け、この位置検出装置8により被測定物である配管Aの測定位置を特定するように構成した。
(もっと読む)
電子ビーム校正方法及び電子ビーム装置

【課題】電子ビーム装置で用いられる偏向校正を高精度で行う電子ビーム校正技術を提供する。
【解決手段】電子ビームの走査方向に対して格子の方向を水平方向になるように一次元回折格子を配置させ、かつ格子のピッチ寸法に一致するように電子ビーム走査を垂直方向に移動させながら水平に走査する。得られた二次電子信号像から、モアレ干渉縞の有無で電子ビームの走査に対する垂直方向の偏向校正が正しく行われているか判定できる。
(もっと読む)
膜厚計測方法、膜厚計測プログラム、及び半導体装置の製造方法
【課題】 半導体基板上に転写・形成された半導体集積回路パターンの高精度膜厚測定を非破壊検査で可能とする膜厚計測方法を提供する。
【解決手段】 製品パターンの製品2次電子信号波形を取得するステップ、製品2次電子信号波形から複数の製品特徴量を抽出するステップ、製品パターンと寸法規格が同じテストパターンの複数のモデル特徴量と複数の露光条件のそれぞれを未知数とする、予め算出された複数のモデル関数を用い、製品パターンの膜厚を計測するステップとを有する。
(もっと読む)
走査型電子顕微鏡における定量的3次元再構成のための方法および装置
【課題】走査型電子顕微鏡システムにおける3次元トモグラフィ・イメージ生成のための方法と装置を提供する。
【解決手段】標本の上端表面上に少なくとも2つの縦のマークを備え、それらの間に角度を持たせる。連続するイメージ記録において、それらのマークの位置が決定され、連続するイメージ記録の間において取り出されたスライスの厚さの定量化に使用される。
(もっと読む)
荷電粒子ビーム描画装置のビーム位置補正方法
【課題】 荷電粒子ビーム描画装置のビーム位置補正を精度良く行う方法を実現する。
【解決手段】 メトロロジー測定を複数のマーク位置について正順および逆順でそれぞれ行ってマーク位置ごとの位置誤差とピッチング値またはヨーイング値を互いに垂直な2軸方向において求め(101)、位置誤差とピッチング値またはヨーイング値について正順と逆順の差をマーク位置ごとに互いに垂直な2軸方向において求め(101)、アッベエラーによるマーク位置ごとのビーム位置補正効果を予め仮定された複数のアッベエラーについてそれぞれシミュレーションして、位置誤差の正順と逆順の差が複数のマーク位置を通じて互いに垂直な2軸方向においてそれぞれ最小となる2種類のアッベエラーを互いに垂直な2軸方向のアッベエラーとしてそれぞれ特定し(103)、それらアッベエラーを用いてビーム位置を補正する(104)。
(もっと読む)
回路パターンの検査方法及び検査装置
【課題】白色光・レーザ光、あるいは電子線を照射して形成された画像を用いて微細な回路パターンを検査する技術において、検査に必要な各種条件を設定する際にその操作性効率を向上するめの技術を提供する。
【解決手段】回路パターンが形成された基板表面に光、あるいは光および荷電粒子線を照射する手段と、該基板から発生する信号を検出する手段と、検出手段により検出された信号を画像化して一時的に記憶する手段と、上記記憶された当該領域の画像を他の同一の回路パターンが形成された領域と比較する手段と、比較結果から回路パターン上の欠陥を判別する手段からなる回路パターンの検査装置であって、検査用および検査条件設定用の操作画面に操作内容あるいは入力内容を表示する画面領域とその画面を表す項目名を表示する手段を備えており、且つ該項目名は該操作画面領域で一体化して表示する。
(もっと読む)
測定値の判定方法
【目的】本発明は、被測定対象物上のパターンの線幅あるいは線間隔などを測定した測定値の良否を判定する測定値の判定方法に関し、画像撮影時の焦点合わせの不良による画像の不明瞭、更にチャージによる画像ドリフトによる画像の不明瞭などによる、パターンの線幅などの測定不良を自動判定することを目的とする。
【構成】 被測定対象物上のパターンの信号強度分布を取得するステップと、取得した信号強度分布から当該パターンのエッジ位置を検出するステップと、取得した信号強度分布からパターンのエッジ部分のテーパ幅を検出するステップと、検出したテーパ幅が予め設定した所定範囲内のときに検出したエッジ位置をもとに算出した測定値が正しいと判定するステップとを有する。
(もっと読む)
アライメントマーク及びアライメントマークの検出方法
【課題】 アライメントマークが認識領域から外れた状況下でも、比較的短時間でアライメントマークを検出することを可能とするアライメントマーク、及びアライメントマークの検出方法を提供する。
【解決手段】 本発明のアライメントマーク1は、位置検出に使用されるメインパターン1mと、メインパターン1mの周囲に近接して設けられた複数のサブパターン1sを備える。サブパターン1sはメインパターン1mと異なる形状を有しており、メインパターン1mとサブパターン1sとの間隔を、位置ずれによりメインパターン1mが認識領域外に位置するときに、少なくとも1のサブパターン1sが認識領域内に位置する間隔とすることで、サブパターン1sによりフォーカスを合わせることが可能となる。認識エラーによる測長SEMの動作停止を回避することができるとともに、比較的短時間で、位置検出を行うことができる。
(もっと読む)
画像内にあるオブジェクトのスケーリングを可能にするための画像処理装置、イメージングシステム、コンピュータプログラム及び方法
本発明は画像内にあるオブジェクトをスケーリングする画像処理装置に関する。前記画像処理装置は、マーカの実際の寸法と、画像内にあるこのマーカのピクセル単位での寸法との間の関係から得られる較正係数に基づいて前記オブジェクトをスケーリングするキャリブレータを有し、ここでキャリブレータはさらに、前記画像内において識別される複数の異なる配向のマーカを使用して得られる複数の較正係数を生成する。画像(I)は、解剖学的構造(2)対してこれらオブジェクトの異なる位置合わせとなる、空間において異なって配向される複数のオブジェクト(3、8、9)を有する。前記オブジェクト(3)は計測ツールにリンクされ、これは前記オブジェクト(3)のピクセル単位での長さを計測し、マーカ(A)から決められる較正係数を使用して、前記オブジェクト(3)の実際の寸法を計算する。前記マーカは空間においてオブジェクト(3)と同様に位置合わせされる。画像(I)はさらに、計測ツールにリンクされるオブジェクトを有し、これは、これらオブジェクトのピクセル単位での夫々の長さに基づいてこれらオブジェクト(8、9)の実際の長さ、及び前記マーカ(B)を使用して決められる較正係数を計算する。好ましくは、別々のマーカに対応するオブジェクトがグループ化され、較正グループを形成し、これにより、較正係数の更新が同じ較正グループ内にある全てのオブジェクトに対する実際の寸法の自動更新となる。好ましくは、各較正グループはユーザの便宜に対し別々に識別される。本発明はさらに、画像内にあるオブジェクトのスケーリングを可能にするためのイメージングシステム、コンピュータプログラム及び方法にも関する。  (もっと読む)
(もっと読む)
21 - 29 / 29
[ Back to top ]