
Fターム[2F077TT43]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | 内挿、補間 (427) | 多相信号によるもの (28)
Fターム[2F077TT43]の下位に属するFターム
多相信号の発生、位相差信号の発生 (5)
Fターム[2F077TT43]に分類される特許
1 - 20 / 23
検出装置、駆動装置
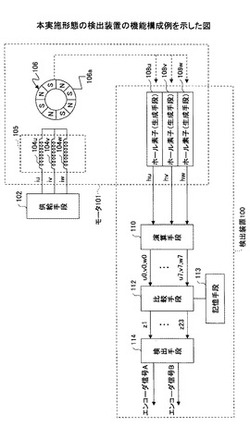
【課題】小型化を図った検出装置、駆動装置を提供する。
【解決手段】モータの回転角度に応じて、それぞれの位相が異なるL個(Lは、2以上の整数)の第1正弦波信号を生成する生成手段と、前記L個の第1正弦波信号それぞれを用いた演算を行なうことにより、M個(Mは、M>Lを満たす整数)の第2正弦波信号を生成する演算手段と、前記M個の第2正弦波信号それぞれの振幅値と、予め定められた閾値とを比較し、比較結果を示すN個(Nは、N≧Mを満たす整数)の比較結果信号を生成する比較手段と、前記比較手段により生成された前記N個の比較結果信号に基づいて、前記モータの回転位置および前記モータの回転速度のうち少なくとも一方を検出するための検出信号を生成する検出手段と、を有することを特徴とする検出装置。
(もっと読む)
レゾルバ

【課題】励磁コイル平板や検出コイル平板自体が、円周方向において、波打ち等の変形を成している場合であっても、高精度を維持できるレゾルバを提供すること。
【解決手段】(a)SIN信号検出コイル10が、円周方向に2分割され、かつ径方向にも2分割されており、外周側にSIN第1コイル11とSIN第2コイル12が配置され、内周側にSIN第3コイル13とSIN第4コイル14が配置されていること、(b)SIN第1コイル11とSIN第3コイル13が円周方向で対向して配置され、SIN第2コイル12とSIN第4コイル14が円周方向で対向して配置されていること、(c)SIN第1コイル11とSIN第4コイル14が第1コイル層5に配置され、SIN第2コイル12とSIN第3コイル13が第2コイル層3に配置されていること、を特徴とする。
(もっと読む)
回転角検出装置
【課題】複数の正弦波信号のうちの1つの正弦波信号に中点張り付き異常が発生した場合でも、磁極の移り変わりを正確に検出できるようになる回転角検出装置を提供する。
【解決手段】ロータ1の周囲には、3つの磁気センサ21,22,23が、ロータ1の回転中心軸を中心として、所定角度の角度間隔をおいて配置されている。磁気センサ21,22,23からは、所定の位相差45°を有する正弦波信号が出力される。回転角演算装置20は、第1の出力信号V1の磁極の移り変わりを、次のようにして検出する。具体的には、回転角演算装置20は、第2の出力信号V2の今回値と第3の出力信号V2の今回値のうち、その絶対値が大きい方の値と、第1の出力信号V1の前回値と、第1の出力信号V1の今回値とに基づいて、第1の出力信号V1の磁極の移り変わりを検出する。
(もっと読む)
回転角検出装置、トルク検出装置、及び電動パワーステアリング装置
【課題】高い角度分解能を確保しつつ、一の回転角センサが出力するセンサ信号に基づいて検出対象の機械的な一回転を一周期とする機械角の検出が可能な回転角検出装置を提供すること。
【解決手段】トルクセンサを構成する各回転角センサは、3倍角成分及び7倍角成分の合成波形を有するとともに回転角に応じた信号変化の位相が均等にずれた三相のセンサ信号を出力する。一方、各回転角検出部は、各センサ値a,b,cから該各センサ値a,b,cの平均値を減算して各センサ値a,b,cに含まれる7倍角成分の値を抽出することにより7倍の軸倍角を有する電気角θelを検出する。そして、その電気角θelに基づき推定される7個の機械角推定値θab_e(θab_e1〜θab_e7)を3倍角成分に換算して上記各センサ値a,b,cの平均値と比較することにより、検出対象であるステアリングシャフトの機械角θabを検出する。
(もっと読む)
回転角度位置検出装置及びその誤差検出方法
【課題】簡易な構成でレゾルバから出力される多相出力信号に基づいて位置検出値を演算する位置信号演算部の検出誤差を求める。
【解決手段】ロータの回転角に応じて360°/N(Nは3以上の整数)毎の位相差を有する位置信号を出力し、且つ2以上の軸倍角を持つ多極のレゾルバと、前記レゾルバから出力されるN相位置信号に基づいて位置検出値を演算する位置信号演算部と、前記N相位置信号の前記位置信号演算部のN相入力端子への入力を順次シフトさせたN段階に切換える信号切換回路と、該信号切換回路で入力を切換える毎に、前記位置検出値からN回の検出誤差を機械角360度の全角度範囲で計測し、計測したN回の検出誤差の夫々について軸倍角数毎の範囲で軸倍角範囲平均値を算出し、算出したN個の軸倍角範囲平均値の平均値に基づいて前記位置信号演算部の検出誤差を算出する検出誤差算出部とを備えている。
(もっと読む)
回転角検出装置及び電動パワーステアリング装置
【課題】サンプリングタイミングと励磁周期との同期の問題を解消して、より一層の性能向上を実現することができる回転角検出装置を提供すること。
【解決手段】励磁信号S_eを出力する制御マイコンとは独立に設けられた監視マイコンは、レゾルバの出力する各相のセンサ信号Sa,Sb,Scを独自にサンプリングし、その各サンプリング値a,b,cに基づいて、該各センサ信号Sa,Sb,Sc間における二信号の組み合わせ数に対応する3つの回転角検出値(θ1,θ2,θ3)を演算する。そして、その該各回転角検出値間の差分、及びその総和を監視することにより、回転角検出過程における異常判定を実行する。また、監視マイコンは、各センサ信号Sa,Sb,Scと同一のタイミングで励磁信号S_eをサンプリングする。そして、そのサンプリング値Rが「負」である場合には、上記各サンプリング値a,b,cの符号を反転して、上記各回転角検出値の演算を実行する。
(もっと読む)
回転角検出装置
【課題】検出精度を高めることができる回転角検出装置を提供する。
【解決手段】第1の回転角演算部21は、第1の磁気センサ11の出力信号V1と、第2の磁気センサ12の出力信号V2とに基づいて、ロータ1の回転角に相当する第1の回転角θ1を演算する。第2の回転角演算部22は、第2の磁気センサ12の出力信号V2と、第3の磁気センサ13の出力信号V3とに基づいて、ロータ1の回転角に相当する第2の回転角θ2を演算する。回転角選択部23は、第1の回転角θ1と第2の回転角θ2とを用いて最終的な回転角θを求める。
(もっと読む)
位置検出器
【課題】被検出部とセンサヘッド間の隙間を広くでき、水蒸気とか油の浮遊するような悪環境での使用を可能とし、秒速10mのような高速で移動する物体の、ミクロンオーダの高分解能の位置計測や、50m以上の長距離計測を行うことが可能な位置検出手段の提供。
【解決手段】矩形板状の磁性体1に溝2を空け、この磁性体1に平行に、2または4個の磁石を等ピッチに並べ、磁性体1と磁石5の間隙に、4個の磁気センサ3で出来たブリッジ4を2または4組配置し、このブリッジ4に1頂角より正弦波を入力し、他頂角より出力信号を取り出し、各出力信号7を三角関数の加法定理により組合せ、磁性体1の位置を、入力信号と加法出力信号との位相差を計測するように工夫した、直線または回転位置検出器。
(もっと読む)
角度センサのための方法および装置
センサが、磁石に対するセンサ素子の不整合の影響を最小化する。一実施形態において、センサは、磁石と、磁石に対して位置付けられた第1、第2、および第3のセンサ素子と、第1、第2、および第3のセンサ素子からの出力信号を処理して第1および第2の信号を生成し、第1および第2の信号の直角位相関係を最大化することにより、磁石に対する第1、第2、および第3のセンサ素子の位置的不整合の影響を最小化するための信号処理モジュールと、を備える。  (もっと読む)
(もっと読む)
三相の光学エンコーダのための角度計算装置および角度計算方法
【課題】堅個性および高い分解能を有する三相の光学エンコーダのための角度計算装置および角度計算方の提供。
【解決手段】光学エンコーダから120°の位相である三相の正弦波信号を受信し、モータ回転子の角度情報を得る。角度計算装置は、A/Dコンバータ、デジタル処理回路(DSP)、位相デジタイザおよびデジタル・カウンタを含む。A/Dコンバータは、光学エンコーダの三相のアナログ信号を三相のデジタル信号に変換する。位相デジタイザは、三相のアナログ信号をデジタル位相信号に変換する。デジタル・カウンタは、デジタル位相信号に基づいて計数値を生成する。DSPは、角度情報を得るため、三相のデジタル信号の比較的直線の領域で逆三角関数計算を実行する。DSPは、計数値により、モータ回転子の回転数および回転方向を得る。
(もっと読む)
多回転絶対角検出装置
【課題】360度以上の角度範囲内の絶対角度を高精度に検出可能な多回転絶対角検出装置を提供する。
【解決手段】機構部に、回転体1と、回転体1に従動する従動回転部材2と、従動回転部材2に従動して間欠的に回転する間欠回転部材3と、従動回転部材2に取り付けられた磁石4と、磁石4と対向に配置され、従動回転部材2の1回転を1周期とする正弦信号及び余弦信号を出力する磁気センサ5と、間欠回転部材3に形成された第1及び第2のコードパターン6,7と、これらの各コードパターン6,7に対向して配置された第1乃至第7の検出素子8〜14とを含む。検出素子8〜14の出力信号に基づいて回転体1の1回転を等分するセクタを識別し、正弦信号及び余弦信号から算出される逆正接値に基づいてセクタ内の絶対角を検出する。回転体1と従動回転部材2との間に、中間回転部材23を配置することもできる。
(もっと読む)
回転角度検出装置
【課題】分割処理を行う周期信号自体を計数することなく回転角度情報を算出し、ハード的な合成手段のコストを節約し、除算を必要とする分割計算を1回で処理するため、計算時間の短縮を図る。
【解決手段】回転ディスク1の回転情報を、位相が90度異なる2つの周期信号を1組として出力する2個所の検出手段3a、3bで検出し、2組の周期信号を一定時間間隔でアナログデジタル変換手段5a、5bでデジタル信号に変換し、2組の周期信号を2値化手段6a、6bで2値化する。2値化したそれぞれの信号の立上りと立下りごとに計数手段8a、8bで計数し、2個の計数結果を加算手段9で加算し、デジタル信号処理手段7によりアナログデジタル変換値と計数結果を基に検出手段3a、3bの出力を平均化する。
(もっと読む)
位置又は移動用測定系を有するモータ
ステータ又は二次部品等の磁石無しの主駆動構成要素と、高い分解能で位置又は移動を判定するための測定系とを備えたモータを提供する。このモータは第2モータ部品(110)に対し移動可能な第1モータ部品(140)を有する。第1モータ部品(140)に測定系の多数の磁界センサ機構(160)が固着され、これら磁界センサ機構が移動方向に沿って相互に離間している。第2モータ部品(110)は磁石無しの磁極歯(120)を有し、該磁極歯は移動方向に沿ってやはり相互に離間している。磁界センサ機構(160)は各々少なくとも1つの磁石を有し、該磁石の磁界は、磁界センサ機構のセンサによって検出するために磁極歯(120)の1つに通される。各2つの磁界センサ機構(160)間の距離は、各2つの磁極歯(120)の間の距離とは異なる。こうして例えば、非永久磁石二次部品を有する同期リニアモータにおいて位置判定を精密できる。  (もっと読む)
(もっと読む)
レゾルバ位置信号の復調方法
【課題】ドライバはフィードバック信号を正確に読み取るができ、ひいては分解能を向上できる。
【解決手段】一つの励起信号を入力して、プッシュプル増幅回路によりファアウト(fan-out)能力を向上した後、一つの電圧調整器によりレゾルバの出力信号の振幅を一致にすることによって分解能を向上して、減算器により復調をして、一つの増幅回路により信号の大きさを調整し、これにより、レゾルバ/デジタル転換器(RDC,Resolver to Digital Converter)又は制御器は信号波形を読み取り可能になることを特徴とするレゾルバ位置信号の復調方法。
(もっと読む)
磁気エンコーダ
【課題】 従来よりも倍周波(1/2の周期)のパルス信号を出力することを可能とした磁気エンコーダを提供する。
【解決手段】 個々の磁気抵抗効果素子A1,A2,A3,A4は、少なくともピン層と前記磁性体11が発する外部磁界に基づいて内部の磁化方向が変化するフリー層とを有し、前記ピン層の磁化方向αが前記外周側面に平行で且つ前記回転方向ra1−ra2に対し垂直となる第1の方向Z2又は前記第1の方向Z2に対して逆向きとなる第2の方向Z1に設定され、且つ前記フリー層の初期磁化方向β0が前記第1の方向Z2又は前記第2の方向Z1に設定されており、 前記回転方向ra1−ra2に隣り合うN極とS極間の磁極間ピッチをλとしたときに、各磁気抵抗効果素子A1,A2,A3,A4間の配列ピッチをλ/2に設定した。
(もっと読む)
高分解能位置測定用のエンコーダ信号分析システム
磁気軸の位置を特定する装置及び方法を提供する。N個の磁界センサが、軸の周期的磁界に対して、180/Nの相対位相シフトに対応して固定された位置に配置される。テーブルが、N>2個の所定の信号モデルと、それぞれに関連付けられる事前に特定されている位置とを提供する。補間器が、N個の測定されたセンサ信号の表現を少なくとも2つの所定のモデルと比較し、事前に特定されている別の位置を提供する補正信号を生成する。補正信号は、軸のすべての位置に対してN個のセンサによって決まる。反復プロセスにおいて、補正信号を使用して、軸の近似的な位置として、テーブルから、上述の事前に特定されている別の位置を増分的に選択し、最小の補正信号を見つけて位置を特定する。  (もっと読む)
(もっと読む)
回転角度検出装置
【課題】要求される検出精度を維持しつつ、応答速度の好適な向上を図ることのできる回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、クランク軸300の回動に伴って回動する着磁ロータ200から発せられる磁気ベクトルMVの変化を感知する8つのホール素子対111a〜111hを有して構成される。これら8つのホール素子対111a〜111hは、磁気ベクトルMVの変化を各々位相の異なる正弦波信号として感知するように配置されている。ここで、回転角度検出装置は、それらホール素子対111a〜111hの別に得られる出力信号の直線性の高い角度領域が上記クランク軸300の回動に伴って順次に取り出されるかたちで同クランク軸300の回転角度毎にそれら出力信号の1つを選択的に出力する信号処理部を備える。
(もっと読む)
角度検出装置
【課題】 簡単な工程を経て製造することができ、しかも広範囲の角度を精度よく検出することができる角度検出装置を提供する。
【解決手段】 角度検出装置は、複数(例えば4つ)の磁気抵抗素子を利用してシフトレバー等の部品の操作角度を検出する装置である。磁気抵抗素子は45度の配置間隔で車体等に取り付けられている。そして、互いに90度の配置間隔を成す磁気抵抗素子の出力の間で差分を各々とり、この差分の和の電圧値を算出する。続いて、和の電圧値の交流波W1を半波整流してパルス信号V1に変換し、磁気抵抗素子群に流される正弦波電流も同じく半波整流してパルス信号V2に変換し、これらの差の絶対値|V|を算出する。そして、この絶対値|V|を正弦波電流の半周期T/2で平滑化し、これを磁界向きθに応じた角度信号として出力する。
(もっと読む)
絶対回転角度およびトルク検出装置
【課題】回転軸に連結し外周面に交互に極性の異なる磁極を着磁させたターゲットを用いて、高精度・高分解能に多回転の絶対回転角度およびトルク検出を行う装置を提供することを目的とする。
【解決手段】入力軸2と連結し外周面に等間隔をなして交互に極性の異なる磁極が着磁してある第1のターゲット3を保持し多回転可能な歯車を持つ第1の回転体1と、この第1の回転体1の歯車に接続され第1の回転体1より低速に回転し、中心部に磁石9が配置された第2の回転体8と、出力軸5と連結し外周面に等間隔をなして交互に極性の異なる磁極が着磁してある第2のターゲット6を保持し多回転可能な歯車を持つ第3の回転体4と、これらのそれぞれの回転角度を検出する第1、第2、第3の検出手段11、10、12からなる簡単な構成で、高精度・高分解能に絶対回転角度およびトルク検出を行うものである。
(もっと読む)
回転角検出装置
【課題】オフセット電圧や電気ノイズが発生しても磁界の回転角の検出精度が劣化し難い回転角検出装置を提供する。
【解決手段】2n個の磁電変換素子と、3n個の差動増幅器を有してなり、2個の磁電変換素子11a,11bおよび12a,12bと3個の差動増幅器21a,21b,31および22a,22b,32をそれぞれ一組とし、第1段で、2個の磁電変換素子11a,11bおよび12a,12bからの出力信号を、それぞれ、2個の差動増幅器21a,21bおよび22a,22bの入力端子に互いに反転して入力し、第2段で、2個の差動増幅器21a,21bおよび22a,22bからの出力信号を、それぞれ、残る1個の差動増幅器31および32の入力端子に互いに反転して入力し、各組の第2段の差動増幅器31および32からの出力信号を演算することによって、磁界Bの回転角を検出する。
(もっと読む)
1 - 20 / 23
[ Back to top ]