
Fターム[2F105CD05]の内容
Fターム[2F105CD05]の下位に属するFターム
Fターム[2F105CD05]に分類される特許
581 - 596 / 596
MEMS振動型慣性センサ用組込み試験
本発明は、慣性センサによって供給された、誤っているかまたは紛らわしいデータの識別を支援することにより信頼性改善を支援する、あるレベルの組込み試験を有するMEMS振動型慣性センサを提供する。試験信号がMEMS振動型慣性センサの1つまたは複数の入力に注入され、この試験信号は、1つまたは複数のMEMS振動型慣性センサ出力で試験信号成分を生成する。次いで、この試験信号成分が1つまたは複数の出力で観測される。この試験信号成分が、元の試験信号の少なくとも所定の特性と一致するなら、MEMS振動型慣性センサが適正に動作しており、誤っているかまたは紛らわしいデータを生成していないことがより有望である。実施形態には、試験信号が通常の機能動作中に供給され観測されるものがある。本発明は、慣性センサによって供給された、誤っているかまたは紛らわしいデータの識別を支援することにより信頼性改善を支援する、あるレベルの組込み試験を有するMEMS振動型慣性センサを提供する。例示の一実施形態では、試験信号がMEMS振動型慣性センサの1つまたは複数の入力に注入され、この試験信号は、1つまたは複数のMEMS振動型慣性センサ出力で試験信号成分を生成する。次いで、この試験信号成分が1つまたは複数の出力で観測される。この試験信号成分が、元の試験信号の少なくとも所定の特性と一致するなら、MEMS振動型慣性センサが適正に動作しており、誤っているかまたは紛らわしいデータを生成していないことがより有望である。実施形態には、MEMS振動型慣性センサの通常の機能動作中に試験信号が与えられて観測され、それによってセンサ稼動中の組込み試験を提供するものがある。 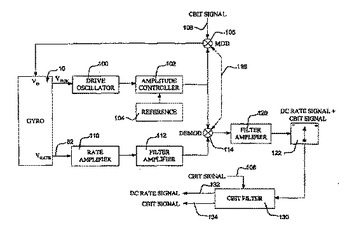 (もっと読む)
(もっと読む)
慣性センサのためのカップリング装置
カップリング装置は、平行な軸に沿った慣性センサエレメントフレームの逆位相の運動を許すが、フレームの同位相の運動を実質的に妨げる。カップリング装置は、第一と第二のセンサエレメントフレームとの間に結合されたバーおよびバーを支持する少なくとも1つの支持構造を含む。少なくとも1つの構造は、フレームの下にある基板に結合される。構造は、フレームが実質的に平行な軸に沿って互いに逆位相で動くときには、バーがピボットポイントで回転することを許すが、フレームの同位相の動きを実質的に妨げる。  (もっと読む)
(もっと読む)
角速度センサ及び運送機器
角速度検知素子2及び第1及び第2の信号処理部21,22の各出力は、その個数に応じた入力端子数を有するスイッチ回路7の各入力端子に供給され、スイッチ回路7の出力端子は、出力端子4に接続される。スイッチ回路7は、モード信号発生回路8から出力されるモード信号に応じて接続状態を切り替え、角速度検知素子2及び第1及び第2の信号処理部21,22の各出力のいずれかを選択して出力端子4へ供給する。 (もっと読む)
直線的にアレイされたセンサエレメントを有する慣性センサ
慣性センサは直線的アレイに構成された少なくとも1対のセンサエレメントを含む。各センサエレメントはフレームおよびフレーム内に吊るされた可動質量を有する。センサエレメントの各対のフレームは、フレームが平行軸に沿って互いに逆位相で動くことを許されるが互いに同位相で動くことを実質的に妨げられるように結合され得る。本発明の一局面に従って、少なくとも1つの基板を有する慣性センサ、および、少なくとも1つの基板の上の実質的に平面内に直線的アレイに構成された少なくとも2対のセンサエレメントが提供される。  (もっと読む)
(もっと読む)
運動センサー、運動センサージャイロスコープ、運動センサーレートジャイロスコープ、回転レートジャイロスコープ
振動回転レートジャイロスコープは、つる巻バネの配列により外部の振動から隔離された宙吊り部品を有する。この隔離された部品は、回転レートジャイロスコープの能動部品及びデジタル処理回路の両方を有する。デジタル処理回路は、外部で決定された及び内部で決定された装置固有の較正値の両方のためのデジタル記憶装置を有する。これらの値は、起動時間を向上する起動処理のためのシード値を提供し、及び装置固有の電子的較正のための値を提供する。デジタル処理回路は、全ての出て行くデータをデジタル形式に更に変換する。デジタル通信プロトコルが利用され、較正情報及び出て行くデータを隔離された部品と2つの導体だけを介して送受信する。宙吊り較正で利用される4個のつる巻バネは、これら導体として利用されるので、如何なる追加の線も必要ない。
 (もっと読む)
(もっと読む)
電子結合を持つ微小機械加工振動ジャイロスコープ、及び方法
一般的には、新しく、改良された微小機械加工振動ジャイロスコープ、及び方法を提供することが、本発明の目的である。本発明のもう1つの目的は、振動するマス間の機械結合を必要としない、上記の特徴のジャイロスコープ、及び方法を提供することである。  (もっと読む)
(もっと読む)
コリオリの角速度計を用いて回転速度/加速度を測定する方法およびこの目的に適ったコリオリの角速度計
本発明は、第1および第2共振器(701,702)を備え、上記第1および第2共振器は第1および第2線形発振器(31,32,41,42)からなる結合系としてそれぞれ形成されており、上記第1共振器(701)と上記第2共振器(702)とが共通の振動軸(72)に沿って逆方向に振動するコリオリの角速度計(1’)に関するものである。本発明の結合系により、回転速度と加速度とを同時に測定することができる。また、本発明の結合系は、外部または内部で生成される振動などの妨害の影響を受けにくい。  (もっと読む)
(もっと読む)
コリオリの角速度計において直交バイアスを補償するための方法、および、これに適したコリオリの角速度計
コリオリの角速度計の直交バイアスを補償するための方法に関するものであり、このコリオリの角速度計の共振器(1)は、第1および第2の線形発振器(3,4)からなる結合系として構成されており、コリオリの角速度計の直交バイアスが決定される。その後、2つの発振器(3,4)の相互のアライメントを補正するための静電場を生成し、決定された直交バイアスが最小となるように、2つの発振器(3,4)のアライメント/強度を制御する。  (もっと読む)
(もっと読む)
微細加工振動構造及び関連するマイクロ・ジャイロスコープ
本発明は、固定支持材(6)に接続された固定端(5)と、進行波又は定在波が生成される振動構造(4)の振動壁(7)を形成する、好ましくは側壁(7)を有する円筒形の中空シェルと、を備える微細加工振動構造(4)に関する。中空シェルは、振動構造(4)に関する固定端(5)を形成する基部と、自由端(9)とを備える。自然分離領域が、中空シェルの固定端(5)と自由端(9)の間に配置される。  (もっと読む)
(もっと読む)
静電駆動装置における信号クロストークを緩和するための変調方法
アナログ駆動信号とピックオフ信号との間の電気的クロス結合の影響を減らすことを目的として、アナログ駆動信号をピックオフ信号から区別する方法である。当該方法は、第1の周波数における周期的なデジタル信号をデジタルデータ値のストリームの形で受信するステップと、デジタルデータ値の少なくとも1つをランダムな形で変換するステップと、そして、デジタルデータ値のストリームをアナログデータ値のストリームにコンバートしてアナログ駆動信号を形成するステップと、を有する。当該方法はまた、第2の周波数において振動するように構成された共振部材に物理的に結合されたセンサを前記アナログ駆動信号で駆動するステップと、そして、ピックオフ信号の生成のために、センサによって検知される共振部材の運動における変化を感知するステップと、を有する。 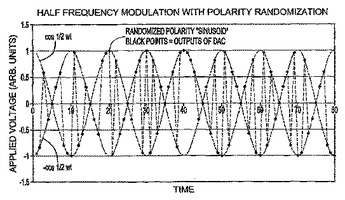 (もっと読む)
(もっと読む)
垂直方向に集積した電子回路およびウェハ・スケール密封包装を含むX−Y軸二重質量音叉ジャイロスコープ
X−Y面内に横方向に配置され、フレーム(34)に間接的に連結されている2つの質量(22,24)を有する角速度センサ。2つの質量(22,24)は、これらの質量が、Z方向に沿って必ず反対方向に移動するように、リンク装置(28,56,58)により連結されている。Y軸を中心にするセンサの角速度は、2つの質量(22,24)をZ方向に反対位相で振動させ、それによりフレーム(34)に加わる角振動の振幅を測定することにより感知することができる。好ましい実施形態では、角速度センサは、バルクMEMSジャイロスコープ・ウェハ(20)、キャップ・ウェハ(42)および基準ウェハ(44)から製造される。他の好ましい実施形態では、ウェハのこのアセンブリは、質量(22,24)と周囲環境との間に密封バリアを形成する。  (もっと読む)
(もっと読む)
Z軸角速度センサー
振動する回転センサは、「z軸」周りの回転を感知するために記述される。それは、構造的結合、及び2つのプルーフ・マスの基本的な反位相振動が機械的結合により実現されるような力学を有するチューニングフォークである。
 (もっと読む)
(もっと読む)
可撓性振動型微小電気機械デバイス
電子センサ・デバイス20用のセンサ素子24に関する。センサ素子24は、基板43、一対のプルーフマス34a,34b、一対の駆動ビーム44、及び1つ以上の基部ビーム46を備える。一対のプルーフマス34a,34bは基板43の上方に懸架され、係留点50にて基板43に取り付けられている。一組の駆動ビーム44はプルーフマス34a,34bと係留点50との間に配設されている。各駆動ビーム44は、第1の方向に延在する第1の長尺状基部62と、第2の方向に沿って延在する第1の可撓性バネ部材64とを含む。基部ビーム46は一組の駆動ビーム44を相互接続し、第2の長尺状基部72及び第2の可撓性バネ部材74とを備える。第2の長尺状基部72は第2の方向に延在し、第2の可撓性バネ部材74は第1の方向に延在する。第1及び第2の可撓性バネ部材64,74は、折り曲げたビームの柱又は襞状バネなど、蛇行形状であってよい。  (もっと読む)
(もっと読む)
軸上及び軸外の方位を有する微細加工装置構造体

【解決手段】1軸の加速度検知及び2軸の角速度検知を与える微細加工マルチセンサである。この微細加工マルチセンサを製造する方法は、犠牲材料又は構造材料の層を基板表面上に堆積する。犠牲又は構造材料の堆積層は、複数の水平及び垂直の空間を有する直線状グリッドを使用して形成された所定のマスクパターンでマスクされる。このマスクパターンは、センサ装置の機能部品を規定する。このマルチセンサが、少なくとも1つの機能部品を有し、その基板上のアラインメントがセンサの最適性能に対して重要である場合、その重要な部品は、その縦軸がマスクの水平又は垂直軸と実質的に平行になるように規定される。このマルチセンサが、少なくとも1つの機能部品を有し、その基板上のアラインメントが最適センサ性能に対して重要でない場合、その重要でない部品は、その縦軸がマスクの水平及び垂直軸と平行にならないように規定される。
(もっと読む)
ハウジングへMEMSデバイスを取り付けるための方法及び装置
ダイ(110)とダイ用のハウジング(202)の間の接着強度を増やす方法が記述される。ダイの上にマイクロ電子機械システム(MEMS)デバイスが形成される。この方法は、接点材料の複数のクラスタ(220)をハウジングの底面(240)上に堆積させる工程と、ダイをクラスタ上に配置する工程と、ハウジング、クラスタ化接点(228)及びダイに熱圧着加工を施す工程と、を含む。
 (もっと読む)
(もっと読む)
回転型デカップルドMEMSジャイロスコープ

【課題】 駆動質量体と感知質量体とを両方デカップルド構造とする。
【解決手段】 X軸を中心に揺動自在な駆動質量体10、Z軸を中心に揺動可能な感知質量体30、及びX軸を中心に駆動質量体10と共に揺動しZ軸を中心に感知質量体30と共に揺動する媒介質量体20を備える。駆動質量体10はX軸を中心に捻れ変形する第1捻れバネ51により基板に、媒介質量体20はZ軸を中心に曲げ変形する第1曲げバネ61により駆動質量体10に、感知質量体30はX軸を中心に捻れ変形する第2捻れバネ52により媒介質量体20に、かつZ軸を中心に曲げ変形する第2曲げバネ62により基板に、各々連結する。駆動質量体10が駆動電極110によってX軸を中心に振動中に外部から角速度が印加されれば、コリオリの力によって感知質量体30がZ軸を中心に回転し感知電極130はこれを感知する。
(もっと読む)
581 - 596 / 596
[ Back to top ]