
Fターム[2G021AK08]の内容
Fターム[2G021AK08]に分類される特許
1 - 12 / 12
影響係数取得方法
【課題】同じ機種である複数の回転機械に対してバランス修正を行う場合に、各回転機械のバランス修正を高精度に行うことを可能にする影響係数を効率的に取得する。
【解決手段】回転機械の回転体を回転させ振動データを生成し(ステップS1)、生成した振動データと基本影響係数とに基づいてアンバランスデータを算出し(ステップS2)、アンバランスデータに基づいて回転体を切削し(ステップS3)、その後、回転機械の回転体を回転させ、振動データを生成し(ステップS4)、生成した振動データと切削のデータと影響係数との関係式を取得する(ステップS7)。同じ機種の複数の回転機械についてそれぞれ取得した複数の関係式に基づいて、当該機種に関する新たな影響係数を求める。
(もっと読む)
影響係数取得方法

【課題】回転体における2つの切削対象部をそれぞれ切削することで回転体のバランス修正を行う場合に、試し錘を使用することなく、精度のよい影響係数を取得する影響係数取得方法を提供する。
【解決手段】互いに異なる条件で得られた回転体の第1および第2の振動データと、第1および第2の切削対象部におけるバランス変化に対する回転体の振動変化を示す基本影響係数とに基づいて、第1および第2の切削対象部に対応する第1および第2のアンバランスデータを算出し、当該データに基づいて回転体を切削してバランス修正を行う(ステップS1、S2、S4)。バランス修正の過程で得た振動データと切削のデータとに基づいて、新たな影響係数を算出する(ステップS9)。
(もっと読む)
影響係数補正方法及び補正機能付き単体バランス装置
【課題】作業者に過度の負担を与えることなく、回転機械の影響係数を効率的に取得できる方法及び装置を提供することにある。
【解決手段】回転体2を支持する支持体3cと、回転体2を回転させる駆動装置3bと、回転体2における影響係数及びアンバランスデータを保持及び算出する演算部7と、真のアンバランスデータが既知であるマスターワーク2bを準備し、回転時におけるマスターワーク2bの振動及び回転角を測定し、演算部7によって振動及び回転角からマスターワーク2bについて振動データを生成し、振動データ及び演算部7に保持されている影響係数からマスターワーク2bについてアンバランスデータを算出し、アンバランスデータと演算部7に保持されている真のアンバランスデータの差が許容値を超える場合には、影響係数の算出を行い、算出した影響係数を演算部7が保持している影響係数と置き換える。
(もっと読む)
影響係数取得方法と装置
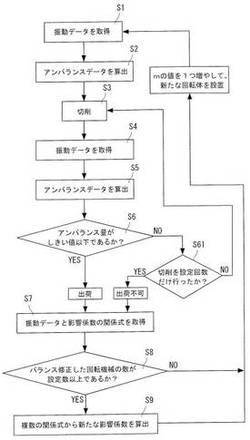
【課題】高精度な影響係数を効率的に取得して、回転体の高精度アンバランス修正を可能にする。
【解決手段】回転体の振動データを取得し(S1)、次いで、アンバランスデータを算出し(S2)、その後、回転体における第1の除去対象部を除去加工し(S4)、回転体の振動データを取得し(S5)、アンバランスデータを算出し(S6)、その後、第2の除去対象部を除去加工し(S8)、次に、回転体の振動データを取得して(S9)、今までに得た振動データと除去加工量および除去加工位置とに基づいて、新たな影響係数を算出する(S10)。
(もっと読む)
アンバランス量測定方法と装置
【課題】基準アンバランス量によって影響係数が変化する場合でも計測回転体の実アンバランス量を正しく測定することができるアンバランス量測定方法と装置を提供する。
【解決手段】同一形状の計測回転体11の1つを基準回転体11Aとして選定し(S1)、基準回転体11Aに2以上の異なる基準アンバランス量Ui(i=1,2・・n:nは2以上の整数)を付与し(S2)、それぞれの振動ベクトルVi(i=1,2・・n)を計測し(S3)、基準アンバランス量Uiと振動ベクトルViから計測点間を中間補間し(S4)、実アンバランス量uと影響係数Fの関係F=f(u)を求め(S5)、計測回転体11を基準回転体と同一条件で回転させて実振動ベクトルvを計測し(S6)、実振動ベクトルvと前記関係F=f(u)から計測回転体11の実アンバランス量uを演算する(S7)。
(もっと読む)
アンバランス測定装置と方法
【課題】振動センサの検出可能範囲を広くしつつ、振動を高精度に検出できるようにする。
【解決手段】回転体11のアンバランス測定装置10であって、所定の基準角度からの回転体の回転角を検出する角度センサ7と、回転体11を回転可能に支持する支持体3の振動を検出する2つ以上の振動センサ5と、角度センサ7からの検出回転角と、振動センサ5からの検出振動とに基づいて、回転体11のアンバランスデータを生成するデータ生成部9と、を備える。2つ以上の振動センサ5は、少なくとも、高感度振動センサ5Hと低感度振動センサ5Lを含む。高感度振動センサ5Hは、低感度振動センサ5Lと比較して、検出可能な振動の大きさの範囲が狭く、かつ、分解能が高い。
(もっと読む)
アンバランス量測定方法と装置
【課題】回転軸用バランサのマウントの軸受特性が変化した場合でも計測回転軸の不釣合いを正しく同定することができるアンバランス量測定方法と装置を提供する。
【解決手段】(S1)複数の計測回転軸1の1つを基準回転軸1Aとして選定し、基準回転軸を回転させかつ加振して、影響係数計測とマウント加振時における振動応答計測を実施し、(S2)影響係数計測とマウント加振時における振動応答計測をシミュレーションする計算モデルを作成し、(S3)計算モデルにより、軸受隙間と振動応答の関係を求め、(S4)計測回転軸1を基準回転軸1Aと同一条件で回転させかつ加振して、不釣合い量と、加振周波数と振動応答の関係を求め、(S5)加振周波数と振動応答の関係と、軸受隙間と振動応答の関係から軸受隙間を求め、(S8)軸受隙間を用いて計算モデルにより影響係数を算出する。
(もっと読む)
影響係数取得方法
【課題】試し錘を使用することなく、精度のよい影響係数を取得する。
【解決手段】回転体の回転バランス変化に対する回転体の振動変化を示す影響係数を取得する影響係数取得方法。回転体が回転している状態で、回転体を支持する支持体の振動を計測することで第1の振動データを取得する第1振動データ取得ステップS1と、回転体の一部を切削することで、回転バランス変化を回転体に与える切削ステップS2と、回転体が回転している状態で、支持体の振動を計測することで第2の振動データを取得する第2振動データ取得ステップS3と、第1の振動データと、切削ステップで与えた回転バランス変化と、第2の振動データとに基づいて、回転体の影響係数を算出する係数算出ステップS4と、を有する。
(もっと読む)
アンバランス計測方法と装置
【課題】軸受と潤滑油との温度差に影響されず、かつ、回転機械の個体毎にアンバランスデータがばらつくことなく、高精度なアンバランスデータを取得する。
【解決手段】回転体を回転駆動させる試運転を複数回行い(ステップS1)、各試運転毎に、データ取得ステップS2、ずれ量算出ステップS3、および判断ステップS4を行う。データ取得ステップS2では、支持体の振動と回転体の回転角を検出し、かつ、振動と回転角から前記回転体のアンバランスデータを算出する。ずれ量算出ステップS3では、試運転のアンバランスデータが、この試運転の直前に行った試運転のアンバランスデータからずれている量を表したずれ量を算出する。判断ステップS4では、ずれ量がしきい値以下であるかを判断する。ずれ量がしきい値以下になるまで、ステップS1〜S4を繰り返す。
(もっと読む)
回転体のアンバランス量算出方法及び装置
【課題】アンバランス量を精度良く算出することができる回転体のアンバランス算出方法及び装置を提供する。
【解決手段】所定範囲の回転数領域で回転数毎に影響係数F(N)を求め、回転する回転体7の回転角度及び振動を検出して回転数毎の振動データV(N)を算出し、回転数毎の振動データV(N)と、それぞれの回転数に対応した影響係数F(N)とに基づいて、回転数毎のアンバランス量U(N)を算出し、得られた回転数毎のアンバランス量U(N)を平均化して、回転体7のアンバランス量Uを算出する。
(もっと読む)
回転機械の調整装置、回転機械の調整方法及びX線CT装置の製造方法
【課題】回転時のバランス調整を容易、且つ、高精度で行うことが可能な回転機械の調整方法及び調整装置を提供すること。
【解決手段】軸心Cを中心に回転可能に形成された可動ベース51を有する回転機械50の調整装置1、可動ベース51の回転時に、回転機械の前後左右振動の振幅を測定可能に形成された振動ピックアップ10と、可動ベース51に配置させる調整錘30と、調整錘30の位置及び重量を算出する制御部21、記憶部22及びアンプ24を有するPC20とを備え、PC20により振動ピックアップ10により測定された振幅及び所定の関数から、近似式を求め、この近似式から最適な調整錘30の変化量x及び位置θを算出し、調整錘30を配置させる。
(もっと読む)
クランク軸加工システム
【課題】
クランク軸を加工するクランク軸加工システムであって、小型、軽量、且つアンバランス成分の少ないクランク軸を製造できるよう、回転軸の位置を適切に決定可能なクランク軸加工システムを提供することである。
【解決手段】
クランク軸の慣性主軸を求めるマスセンタリングステーションと、この慣性主軸に基づいてクランク軸の回転軸を決定する回転軸決定手段と、この回転軸に基づいてクランク軸を加工する加工ステーションと、加工されたクランク軸のバランス修正を行うバランス修正ステーションと、計測された加工後のクランク軸のアンバランス量を用いて、回転軸決定手段がクランク軸の回転軸を決定する際に使用される係数を算出する係数算出手段と、を有する。
(もっと読む)
1 - 12 / 12
[ Back to top ]