
Fターム[2G021AK10]の内容
Fターム[2G021AK10]に分類される特許
1 - 15 / 15
タイヤバランス試験方法及びタイヤバランス試験機
【課題】タイヤの回転速度が一定でない域においても、高精度にタイヤの不釣り合い状態を検査でき、ひいては検査サイクルタイムを可及的に短縮可能とするようにする。
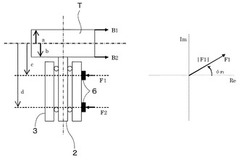
【解決手段】本発明のタイヤバランス試験方法は、スピンドル軸2に対するタイヤTの取付け角度が異なるものとされた複数のタイヤT設置状態で且つ種々の回転速度において、タイヤTを保持するスピンドル軸2に発生する荷重を測定し、測定されたバランス荷重から、タイヤTの回転加速時又は回転減速時における補正データを求めておき、実測時には、回転するスピンドル軸2に発生するバランス荷重を測定すると共に、測定されたバランス荷重を補正データを用いて補正することで、タイヤTの不釣り合い状態を測定する。
(もっと読む)
バランス修正方法と装置

【課題】回転機械に備えられる回転体のバランス修正において、回転体の切削対象部の傾きを考慮して、切削対象部を切削することで、バランス修正の精度を向上させることにある。
【解決手段】切削データ取得ステップS1で、アンバランスを除くために切削対象部を軸方向に切削する位相角と、当該切削の深さとを、それぞれ、切削位相角と切削深さとして予め求める。傾き計測ステップS2で、軸方向に対する切削対象部の加工開始面の傾きを計測する。移動距離取得ステップS3で、切削位相角と切削深さと傾きとに基づいて、切削位相角において、加工用初期位置から加工具を軸方向に移動させる移動距離を求める。切削ステップS4で、切削位相角において、移動距離だけ、加工用初期位置から加工開始面側の軸方向に加工具を移動させることで、切削対象部を切削する。
(もっと読む)
アンバランス量測定方法と装置
【課題】基準アンバランス量によって影響係数が変化する場合でも計測回転体の実アンバランス量を正しく測定することができるアンバランス量測定方法と装置を提供する。
【解決手段】同一形状の計測回転体11の1つを基準回転体11Aとして選定し(S1)、基準回転体11Aに2以上の異なる基準アンバランス量Ui(i=1,2・・n:nは2以上の整数)を付与し(S2)、それぞれの振動ベクトルVi(i=1,2・・n)を計測し(S3)、基準アンバランス量Uiと振動ベクトルViから計測点間を中間補間し(S4)、実アンバランス量uと影響係数Fの関係F=f(u)を求め(S5)、計測回転体11を基準回転体と同一条件で回転させて実振動ベクトルvを計測し(S6)、実振動ベクトルvと前記関係F=f(u)から計測回転体11の実アンバランス量uを演算する(S7)。
(もっと読む)
タイヤ用ダイナミックバランス検査装置
【課題】 ロードセルで検出されたデータにノイズが重畳するのを防止して測定誤差を小さくすることができるタイヤ用ダイナミックバランス検査装置を提供する。
【解決手段】 第1計測ユニット8a及び第2計測ユニット8bは、回転軸2の第1及び第2不釣合い力をそれぞれ検出する第1ロードセル10a及び第2ロードセル10bと、第1ロードセル10a及び第2ロードセル10bで検出された荷重をエンコーダ9で検出された回転軸2の回転位置に対応付けられたデジタルデータとして出力する第1制御器11a及び第2制御器11bとをそれぞれ有し、第1制御器11aと第2制御器11bとはエンコーダ9で検出された回転軸2の回転位置に基づいて同期されている。
(もっと読む)
除去加工深さ決定方法と装置
【課題】回転体の除去加工対象部をその軸方向に除去加工する場合に、回転体の偏心を考慮して、除去加工深さを決定できるようにする新たな手段を提供する。
【解決手段】回転体のバランスを修正するために、回転体の除去加工対象部を除去加工する場合に、回転体の回転中心に対する除去加工対象部の幾何学的中心の偏心に基づいて、除去加工深さを決定する除去加工深さ決定方法であって、偏心を表す偏心データを取得する偏心データ取得ステップS1と、測定により得られた回転体のアンバランスデータに基づいて、アンバランスを除去するために除去加工すべき除去加工位置と除去加工深さを算出する算出ステップS2と、偏心データに基づいて、算出ステップで得た除去加工深さを補正する補正ステップS3とを有する。
(もっと読む)
タイヤ試験機及びタイヤ試験方法
【課題】 タイヤ試験機において、保持器の回転角度に同期した誤差成分を確実に取り除いてタイヤのユニフォミティを高精度に計測する。
【解決手段】本発明のタイヤ試験機1は、タイヤTを保持するタイヤ軸2と、タイヤ軸2をタイヤTの軸心回りに軸受部15を介して回転自在に支持するハウジング3と、タイヤ軸2に保持されたタイヤTに対して接離自在に配備された回転ドラム4とを有し、さらにタイヤ軸2に発生するユニフォミティ波形を測定するユニフォミティ測定部21と、軸受部15のアウター部16とインナー部17との間に保持された転動体18の保持器19に関して、ハウジング3に対する保持器19の回転角度を計測する回転計測器27と、ユニフォミティ波形の測定結果を保持器19の回転角度を元に補正する演算部28と、を有している。
(もっと読む)
測定装置及び測定方法、調整システム及び調整方法
【課題】 テンプの回転バランスを精度良く測定できる測定装置を提供する。
【解決手段】 測定装置は、テンプを回転可能に支持する支持部材と、支持部材を支持し、テンプの回転に応じて、支持部材が第1方向に移動するように弾性変形可能な板ばねを含む支持機構と、テンプの回転バランスを測定するために、板ばねの変位量及び変形量の少なくとも一方を検出する第1センサとを備えている。
(もっと読む)
回転体の回転バランス修正装置及び方法
【課題】回転体を回転シャフトに固定するためにナットを用い、アンバランスの修正量と修正方向を、ナットが円形であると想定して求めた場合でも、修正方向に影響されることなく正確な修正量を加工でき、かつその修正によりアンバランス方向が変化しない回転体の回転バランス修正装置及び方法を提供する。
【解決手段】NC位置決め装置12、NC加工装置14、頂点検出器16、および補正制御装置18を備える。頂点検出器16によりナットの頂点位置を検出し、補正制御装置18によりナットが円形であると想定して予め求められたアンバランスの修正量Ucと修正方向θcを、軸心と修正方向に最も近いナットの頂点を結ぶ方位角と修正方向θcとの相対角Δθに応じてそれぞれ補正修正量Uoと補正修正方向θoとして補正する。
(もっと読む)
釣合い試験機などで車両ホイールの偏心を修正する方法
【課題】ホイールのずれの影響を全体として最小にでき、さらに、低価格だけではなく、使用が容易で有効な、かつ単純で合理的な方法を提供すること。
【解決手段】車両ホイールのリムとタイヤの全外周に沿った複数の所定角度位置において、タイヤの半径方向偏心ずれと、リムの半径方向偏心ずれとを読み取る読み取り工程と、読み取られたリムとタイヤの半径方向偏心ずれに基づいて、リムとタイヤの組み合わせ角度位置に対応する、ホイールの半径方向偏心ずれの全体の値を処理する処理工程と、ホイールの半径方向偏心ずれの全体の値およびリムとタイヤの組み合わせ角度位置に対応する、ホイールの幾何学的なずれの指標を定義する定義工程と、可能な全ての組み合わせ角度位置から選択し、指標の値が最小になるタイヤとリムの最適組み合わせ角度位置を決定する決定工程とを備えた、釣合い試験機などで車両ホイールの偏心を修正する方法。
(もっと読む)
タービンロータのアンバランス評価方法およびタービンロータのアンバランス評価装置
【課題】運転中に発生するタービンロータの曲がりに基づく中間位置の状態変化を可視化して特定するタービンロータのアンバランス評価方法およびタービンロータのアンバランス評価装置を提供する。
【解決手段】本発明に係るタービンロータのアンバランス評価方法は、初期データ入力工程(St−1)と、アンバランス診断装置12に計算を行わせて画像処理するタービン曲がりアンバランス算出表示工程(St−2)と、このタービン曲がりアンバランス算出表示工程(St−2)で算出したデータをデータベース化してストアした後(St−3)、過去の履歴データと計測した現在のデータとを比較し、タービンロータの曲がりに基づくタービン曲がり変化評価を行うタービンロータ曲がり変化評価工程(St−4)とを備える。
(もっと読む)
クランク軸加工システム
【課題】
クランク軸を加工するクランク軸加工システムであって、小型、軽量、且つアンバランス成分の少ないクランク軸を製造できるよう、回転軸の位置を適切に決定可能なクランク軸加工システムを提供することである。
【解決手段】
クランク軸の慣性主軸を求めるマスセンタリングステーションと、この慣性主軸に基づいてクランク軸の回転軸を決定する回転軸決定手段と、この回転軸に基づいてクランク軸を加工する加工ステーションと、加工されたクランク軸のバランス修正を行うバランス修正ステーションと、計測された加工後のクランク軸のアンバランス量を用いて、回転軸決定手段がクランク軸の回転軸を決定する際に使用される係数を算出する係数算出手段と、を有する。
(もっと読む)
RRO成長量推定方法、慣らし後RROの推定方法、回転数上昇に起因する慣らし後のRRO成長量の推定方法、RFV成長量推定方法、慣らし後RFVの推定方法、AVV成長量推定方法、及び、慣らし後AVVの推定方法
【課題】本発明は、上記事実を考慮して、ユニフォミティ測定にかかる時間を短縮させても高精度でユニフォミティ検査を行うことを可能にしたRRO成長量推定方法、慣らし後RROの推定方法、回転数上昇に起因する慣らし後のRRO成長量の推定方法、RFV成長量推定方法、慣らし後RFVの推定方法、AVV成長量推定方法、及び、慣らし後AVVの推定方法を提供することを課題とする。
【解決手段】RRO測定対象のタイヤをタイヤ中心軸回りに複数回にわたって回転させて、タイヤの特定箇所について複数のRRO計測値を取得する。そして、取得した複数のRRO計測値に基づいて、経時変化によるRRO成長量推定値を与える近似式(1)を最小二乗法により求める。これにより、経時変化に伴うRRO成長量推定値を短時間で容易に求めることができる。
(もっと読む)
タイヤユニフォミティ修正方法
【課題】 効率的なタイヤユニフォミティ修正方法を提供する。
【解決手段】 目標速度のRRO成長量の実測値又は推定値と、伝達率と、を用い、目標速度の高速RFV推定値を算出する。更に、この伝達率を用い、次数毎に、高速RFVの推定値及び上限値から、高速RFV推定値に相当する低速RFV相当値、及び、高速RFV管理上限値に相当する低速RFV管理上限相当値を求める。そして、次数毎に、低速RFVの相当値及び管理上限相当値を比較して、相当値のうち管理上限相当値を超えている低速RFV超過分相当値を求める。更に、低速RFV超過分相当値からタイヤ一周分の低速RFV超過分推定波形を求め、該推定波形に基づいて低速RFV必要修正量を示す低速RFV必要修正量波形を求める。そして、低速RFV実測値によって得られる低速RFV実測値波形から低速RFV必要修正量波形を減算することにより低速RFVの修正目標波形を求める。
(もっと読む)
動作制御装置に回転可能に設けられた物体における不均衡の算出方法
【課題】
【解決手段】 本発明に1つの態様は、動作制御装置における不均衡を計算する方法を提供する。この動作制御装置は、物体を保持して第1の軸線のまわりに回転させるための物体取付け機構(102)と、この物体取付け機構を変位させるための物体位置決め機構(106)と、この物体位置決め機構を駆動するための物体位置決め駆動体(108)と、第1の軸線のまわりの物体の回転を示す出力信号を発生させるための1つまたはそれ以上の回転検出装置(204)とを有している。この方法は、回転検出装置の出力信号から、第1の軸線のまわりの物体の速度および相を示す物体回転信号を計算する工程と、物体回転信号で駆動手段からの出力信号を復調させて第1の軸線のまわりの物体の回転と同期している復調された出力信号を引き出す工程と、復調された出力信号から物体の不均衡の大きさおよび相を計算する工程とを有している。  (もっと読む)
(もっと読む)
横方向にホイール・バランスする装置と横方向にホイール・バランスするための操作方法
ホイールを横方向にバランスするため、あるいは前記ホイールを横方向にバランスするために前記ホイール上にバランス用錘を設置するための位置を決定するための、装置と操作方法が提供される。提供された操作方法は、細長い部材上で横方向にバランスするホイールを含む。装置は前記ホイールを横方向にバランスする部材(90)を含む。  (もっと読む)
(もっと読む)
1 - 15 / 15
[ Back to top ]