
Fターム[2H103AA45]の内容
カメラのデータ写し込み (273) | 写し込みの対象 (159) | その他の情報 (101) | 高度・水深 (5)
Fターム[2H103AA45]に分類される特許
1 - 5 / 5
電子カメラおよび電子機器
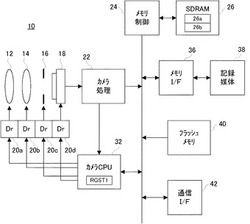
【構成】撮像装置18は、撮像面で捉えられた光学像を表す電子画像を出力する。カメラCPU32は、各々が緯度および経度,高度,ならびに時刻を測定する1または2以上のスマートフォン50と接続し、接続された1または2以上のスマートフォン50の各々の測定結果を取得する。カメラCPU32はまた、撮像装置18から出力された電子画像を取得し、取得された1または2以上の測定結果に基づく環境情報を取得された電子画像に割り当てる。
【効果】電子画像に割り当てる付加情報を簡便に多様化することができる。
(もっと読む)
情報出力装置

【構成】CPU32は、GPS装置42の出力に基づいて現在位置を繰り返し検出し、水深計44の出力に基づいて現在深度を繰り返し検出する。CPU32はまた、位置および深度によって分類された生態系データのうち現在位置に対応する一部の生態系データを外部サーバから取得し、取得された生態系データのうち現在深度に対応する一部の生態系データをLCDモニタ28から出力する。
【効果】LCDモニタ28から出力される生態系データを水深に応じて変更することで、海洋生態系を提示する性能が向上する。
(もっと読む)
撮像装置
【課題】操作の煩わしさを低減することができる撮像装置を提供する。
【解決手段】被写体情報記憶部211は、複数の撮影対象について、撮影対象毎に、撮影対象の撮影位置を示す撮影位置情報と、撮影位置を基準とした撮影対象の方向を示す少なくとも2つの対象方向情報とを対応付けて記憶する。演算部210は、撮像装置の位置報に基づいて、被写体情報記憶部211で記憶されている複数の撮影対象の撮影位置情報の中から少なくとも1つの撮影対象の撮影位置情報を選択し、選択した撮影位置情報に対応付けられて被写体情報記憶部211に記憶されている少なくとも2つの対象方向情報のそれぞれと、撮像装置の撮影方向を示す撮影方向情報との差分である少なくとも2つの方向差分を演算する。表示部202は、演算部210によって演算された少なくとも2つの方向差分に対応する情報を表示する。
(もっと読む)
データ処理装置
【課題】センサの検出結果に基づいて、より正確なデータを得ることができる撮像装置の提供を目的とする。
【解決手段】デジタルカメラ100は、自機環境の気圧情報を検出する気圧センサ161と、気圧センサ161の検出結果に対して所定の処理を行い、高度情報を出力するコントローラ130と、高度情報を出力するために、気圧センサ161の検出結果が基準とする海抜ゼロメートルにおける気圧情報を更新するコントローラ130と、を備える。
(もっと読む)
電子機器
【課題】 本発明では、GPS受信部をもつ撮像装置において、気的接続が容易で、ユーザーにGPS受信部の位置をわかりやすくすることによって、GPS受信時にユーザーが受信部を手で覆うことなく、外観のデザイン自由度を確保したまま、高い確率でGPSから位置、時間情報を取得することが可能な撮像装置を提供することを目的とする。
【解決手段】 製品天面に電波を遮蔽しやすい材質でできた外装カバーを持つ撮像装置において、前記外装カバーの一部に孔を空け、電波を遮蔽しにくい材質で別カバーを設け、別カバーの下に、GPS受信部を設ける。
別カバーの撮像装置把持側の少なくとも一部を、外装カバーよりも突出させる。
別カバーの少なくとも一部を導光部材にする。GPS受信部が実装された基板に、発光部を実装して、導光部に発光部の光が入射するようにする。
検出部を持ち、別カバーが押圧された場合に、押圧を検出させる。
(もっと読む)
1 - 5 / 5
[ Back to top ]