
Fターム[3C007CS08]の内容
マニピュレータ、ロボット (46,145) | 基台 (1,360) | 無軌道で移動するもの (1,271)
Fターム[3C007CS08]に分類される特許
1,261 - 1,271 / 1,271
最小侵襲性介入用ロボット
本開示は、生きて運動する器官を、テーブルに設置されたロボットデバイスの固定基準フレーム内に置くよう不動化しようと努めるより寧ろ、該器官の運動する基準フレーム内にロボットを設置することを提示する。その課題は、心臓の場合に、ポートを通して心膜内に導入され、心外膜に取り付けられ、そして次いで外科医の直接制御下で望まれる治療用位置へ進む、よう設計された小型匍匐ロボットデバイス(10)を含む広い種類のロボットで達成される。鼓動する心臓運動の問題は該デバイスを心外膜に直接取り付けることにより殆ど避けられる。アクセスの問題は移動用能力を組み込むことにより解決される。該デバイスと技術は他の器官そしてペット、飼育場動物、他の様な他の生体に関しても使うことが出来る。  (もっと読む)
(もっと読む)
関係検知システム
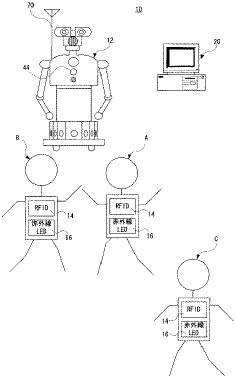
【課題】複数の構成員同士の間の「好き」又は「嫌い」などの関係を把握する関係検知システムを提供する。
【解決手段】関係検知システム10は構成員を近付かせる接近装置としてのコミュニケーションロボット12を含む。組織内の複数の構成員A,B,C…にはたとえば無線タグ14および赤外線LEDタグ16がそれぞれ装着される。構成員がロボット12とコミュニケーションを図るために近付いて所定領域内に入ると、ロボット12に設けられた無線タグ読取装置および赤外線カメラ44によって各識別情報がそれぞれ取得され、そのような所定領域における行動の履歴が記録される。この行動の履歴はたとえば好意を持つ者同士は同時に滞在するなど構成員間の関係が反映されている。この行動履歴に基づいて構成員の他者との共存の仕方から各構成員間の関係が把握される。
(もっと読む)
表面横断装置
本発明は、表面横断装置に関し、この装置は、フレーム、このフレームに設置されるシール外周部を有するシール、およびこの装置を表面に対して移動させるように構成された伝動装置を備える。このシールの外周部は、実質的に、横断されるべき表面と転がり接触するために、適合される。このデバイスは、水平な表面、垂直な表面、反転した表面などに吸引接着し、そしてこの表面に沿って移動し得、そして障害物または表面の不規則性を乗り越え、一方で、この表面に対する吸引接着を維持し得る。このデバイスは、運動する転がりシールアセンブリを用いて、この表面に沿って推進され得る。このアセンブリは、この減圧接着に影響を及ぼすシールと、このデバイスをこの表面にわたって駆動する運動との両方を提供する。  (もっと読む)
(もっと読む)
遠隔操作される流体圧アームを備えた、隔室領域で対象物を操作する装置

【課題】ガラス固化装置の危険な隔室領域で、目標対象物を操作・加工するのに適用することができる種々の装置を提供する。
【解決手段】目標対象物を操作する方法および装置を開示し、マニピュレータ(23)は、トロリ−(13)に固定される基礎(23)と、使用者が遠隔操作できるように基礎(23)に搭載された流体圧ア−ム(24)とを備えている。アーム(24)は、基礎(23)から離れた端部に、目標対象物に作業を施すための種々の工具を取り付けるように配設された工具連結具(25)を具備している。
(もっと読む)
ロボットに搭載されたステレオ・カメラの診断用装置、並びにロボット装置に搭載されたステレオ・カメラの診断方法
【課題】ロボット装置に搭載されたステレオ・カメラの経年変化や機体の転倒などに伴うカメラ位置ずれなどの診断を支援する。
【解決手段】診断用マットは、ランダム・ドット・パターン、フラクタル、自然画などの、均一で繰り返しの無いパターンなど、診断、キャリブレーションにおいて誤マッチングを避けられるようなテクスチャを備える。診断マット上に設置されたロボットは診断用マットを撮影するために適した姿勢をとり、ステレオ・カメラにおいて取得した画像から距離画像を生成し、この距離画像から得られる診断用マットの平面度に基づいて、ステレオ・カメラの性能を検証する。
(もっと読む)
ロボット装置及びその制御方法
【課題】マイク、カメラや種々のセンサで検出することが困難であった外部に存在する対象の情報の正確な確認や識別を可能とするロボット装置を提供する。
【解決手段】自律的に行動を出現させると共に、外部からの入力情報に応じて行動が制御されるロボット装置は、外部に存在する対象に設けられた無線タグ、いわゆるRFID(Radio Frequency Identification)タグから、該RFIDタグに記憶されているデータを読み取る無線タグ読取手段であるRFIDリーダ部19と、RFIDリーダ部19により読み取られたデータに応じた上記対象に関連する情報である対象関連情報に対応する状態認識情報に基づいて行動を制御するコントローラ10とを有する。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】 ロボットの歩行パターン生成演算を、運動状態量に関する境界条件、外力、外力モーメント、足底軌道などのパラメータが設定可能な形式で、実機上で実時間により実行可能にする。
【解決手段】 センサなどから計測されたロボットの運動状態量、外力及び外力モーメント、環境形状などの実世界の物量を入力するように歩行制御系を構成する。機体のバランス維持に係るすべての計算を単一の歩行パターン演算に集約させることにより、歩容生成機能と適応制御機能を効率的に両立させるとともに、力学モデルの一貫性を保証し、各力学モデル間の干渉を取り除く。
(もっと読む)
脚付きロボット用の流体移動によるバランスシステム
本発明は、動いている間または任意の仕事を遂行している間にバランスが失われることを防止し、同様に二つ以上の脚部を有するロボットが重み運搬する際の、脚付きロボット向けのバランスシステムに関する。本発明により開発される、二脚ロボットまたは多脚ロボット向けのバランスシステムは、基本要素としてのバランス流体ポンプ(2)、バランス流体タンク(5)、バランス流体移動管(6)、およびバランス流体(7)によって特徴付けられている。ロボットのバランスは、タンク(5)間でバランス流体(7)を移動させることによって供される。 (もっと読む)
パソコン・バイオ・ナノ・IT機器装脱着施術設置など々、の生活ナレッジナノクローンシステム携帯電話機ロボット(以下ロボットと記す)
【課 題】 人間は、神様の創造物であるとするならば、ロボットは、人間の創造物であり、パートナーとすることで、人間に役だつ機能を具備構成し、日常生活に手助け有効な生活ナレッジナノクローンシステム携帯電話機ロボツトが、人間を上廻る知能を、なしえない事もやってくれるロボットを提供する。
【解決手段】 携帯電話機本体がロボット(検索ロボット呼称など)の役目をする。有線、無線基地局、インターネットプロトコル電話局などと通信して、情報交換、制御データベース変換、履歴ファイル処理、データに基づいた画・映像表示、言語翻訳音声認識、記憶、プログラム入出力指示、発着信指示、駆動指示、電波電源タイムスイッチ切り替え指示入出力部、通信、データモード、識別コード、GPS位置情報等々有し構成する。通信網を介して、ITバイオインフォマティクスロボット、センサーで安全に飛行するロボットを、車の代用とする。又多種多様のロボットを提供できる。
(もっと読む)
ロボットシステム及びロボット装置の制御方法
【課題】本発明は、より一層エンターテインメント性を向上させることを目的とする。
【解決手段】複数のロボット装置が自律的に行動するロボットシステムにおいて、各ロボット装置は無線通信手段を有し、ロボット装置同士で会話する際、当該会話の内容をコマンド及び又はセマンティクスとして双方の無線通信手段を介してロボット装置に送受信するようにした。
(もっと読む)
移動マニピュレータの遠隔操作装置
【課題】 移動体に搭載されたマニピュレータを遠隔地点から操作する際、移動体に設けたビデオカメラによりマニピュレータを撮影し、遠隔地の操縦者の側に設置したモニターに表示しマニピュレータを操作するものにおいて、モニター映像では移動体がスリップしたか物体が移動したかがわからないことがあった。
【解決手段】 例えば海底作業のため移動体1にマニピュレータ2とビデオカメラ3を搭載し、ビデオカメラ3の映像をモニター11に表示し、操縦者はこの画面を見ながらジョイスティック5を操作して、移動体操作信号7、マニピュレータ操作信号8、ビデオカメラ操作信号9を出力し作業を行う。移動体のスリップをスリップ量・方向検出部12で検出し、X−Yステージ駆動制御部13でジョイスティック5が搭載されたX−Yステージ14を同様に移動し、操縦者にスリップの状態を手首を通して体感させることができる。
(もっと読む)
1,261 - 1,271 / 1,271
[ Back to top ]