
Fターム[3C007CW11]の内容
マニピュレータ、ロボット (46,145) | 第2の腕の動作形態 (416) | 第2の腕が回動するもの (374) | 第1関節軸と直交する第2関節軸を有するもの (8)
Fターム[3C007CW11]に分類される特許
1 - 8 / 8
基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法、及び基板位置補正方法
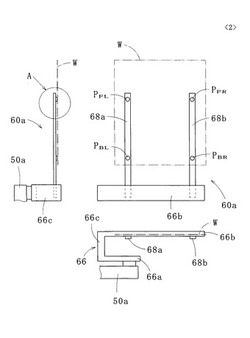
【課題】基板の位置ずれを検出することが可能な基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法を提供する。また、基板位置補正方法を提供する。
【解決手段】基板搬送用ロボットシステム10は、基板Wの下面に接触する接触部PBL、PFL、PBR、PFR及び接触部PBL、PFL、PBR、PFRに接触した基板Wの重心位置を検出するための複数のセンサSBL、SFL、SBR、SFRが設けられた基板搬送用ハンド60を有する基板搬送用ロボット20と、1)基板搬送用ハンド60上の基準となる位置にて基板Wが支持された際の各センサSBL、SFL、SBR、SFRの検出値である基準値と現在の各センサSBL、SFL、SBR、SFRの検出値との差分をそれぞれ演算する差分演算部70及び2)各差分に基づいて基板Wの位置ずれ方向を判断する第1の判断部72を有する第1の制御装置30とを備える。
(もっと読む)
ロボット及びその製造方法

【課題】樹脂で形成された加工精度の高い軽量なロボットアームを備えたロボットを提供する。
【解決手段】第1アーム10に連結された第1アクチュエータ20と、第1アクチュエータ20を収容する第1収容部105を有する関節フレーム100を備え、第1収容部105は、樹脂Aの硬化物により形成された基礎フレーム101と、樹脂Aの硬化物よりも高い融解温度を有する樹脂Bの硬化物により形成された第1フレーム102とを接合して構成され、第1アクチュエータ20は、第1フレーム102に固定される。
(もっと読む)
保持軸およびこれを用いた回転塗装装置
【課題】 保持軸が回転軸から脱落することがあるという欠点を解消し、安定した塗装が可能な回転塗装装置の被塗装物を保持する保持軸を提供することにある。
【解決手段】 塗料を吹付けるスプレーガンに対峙させる回転塗装装置の保持部の保持に
おいて、回転塗装装置の回転軸に挿入される保持軸端部に回転軸に対し直角方向に設
うけた回転伝達用ピンの径より僅かに幅広溝で、底部はピン径より大径の円筒面であ
る溝を設けたことを特徴とする回転塗装装置の保持部の保持軸。
(もっと読む)
被塗装物保持ロボットおよび塗装用ロボットシステム
【課題】塗装中に吹き付けの気流が乱れ、ロボット等の装置周辺を余分な塗料で汚染することを防止することが可能な被塗装物保持ロボットおよび塗装用ロボットシステムを提供する。
【解決手段】被塗装物保持ロボット10は、固定されたベース部20と、第1軸J1を中心にベース部20に対して旋回する細長状の第1アーム11とを備えている。L字状の第2アーム12は、第2軸J2を中心に第1アーム11に対して旋回し、細長状の第3アーム13は、第3軸J3を中心に第2アーム12に対して旋回する。また第3アーム13の先端13bに、被塗装物Wを保持する第1保持部14が設けられている。
(もっと読む)
ロボットアーム、ロボットアームの接触検知方法、及び、ロボットアームを備えた装置
【課題】他の物体への接触を検知する信頼性、経済性、及び、稼働率などを向上させることができ、接触トラブルによる損害をより低減することの可能なロボットアーム、ロボットアームの接触検知方法、及び、ロボットアームを備えた装置の提供を目的とする。
【解決手段】ロボットアーム10は、駆動モータ2a、2b、2cと、モータ軸用の角度センサ22a、22b、22cと、減速機と、出力軸用の角度センサ32a、32b、32cと、ロボットアーム部4a、4b、4cと、モータ制御手段50とを備えた構成としてある。
(もっと読む)
ハンドリングシステム
【課題】本発明は、段取り換えを容易にでき、1つのロボットの動作に複数の機能を備えたハンドリングシステムを提供する。
【解決手段】双腕ロボットを用いた組立作業をするハンドリングシステムにおいて、前記双腕ロボットが、線状体送給部に対面するように配置されたものである。
(もっと読む)
産業ロボットのアーム構造
【課題】低い搬送高さを直線的に動作できる広い動作範囲を持ったコンパクトで低コストな産業ロボットのアーム構造を提供。
【解決手段】固定ベース1上に第1垂直軸aの回りに回転自在に支持された第1水平アーム2と、第1水平アーム2の先端に第2垂直軸bの回りに回転自在に支持された第2水平アーム3と、第2水平アーム3の先端に第4垂直軸dの回りに回転自在に支持された回転基台4と、からなる水平方向移動部と、回転基台4の上に第1水平軸gの回りに回転自在に支持された第1垂直アーム7と、第1垂直アーム7の先端に第2水平軸hの回りに回転自在に支持された第2垂直アーム8と、第2垂直アーム8の先端に第3水平軸iの回りに回転自在に支持された第3垂直アーム9と、第3垂直アーム9の先端に作業工具を取り付けるためのフランジ10を有する水平方向及び垂直方向移動部と、を有する。
(もっと読む)
マニピュレータ及びこれを用いた搬送ロボット
【課題】 手先のアクチュエータ容量を大容量化することなく、アクチュエータの容量を越える負荷がかかるワークを保持する際に姿勢を長時間維持及び搬送できるマニピュレータを提供する。
【解決手段】 マニピュレータの根元に近いフレームA1上に配置した駆動機構により回転軸X4を中心に回動可能にフレームB2を取り付け、さらにフレームB2上に配置した駆動機構により回転軸X4と直交する回転軸Y5を中心に回動可能にフレームC3を取りつけ、フレームC3にエンドエフェクタ8を固定し、エンドエフェクタ8がワークの把持等の作業を行うマニピュレータにおいて、フレームB2に設置したメカストッパB7とフレームC3に設置したメカストッパA6のフラット面が所定の角度で互い押し当てあうようにした。
(もっと読む)
1 - 8 / 8
[ Back to top ]