
Fターム[3C007EV05]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形しない当接部の形状 (352) | 下面当接 (63)
Fターム[3C007EV05]に分類される特許
61 - 63 / 63
トランスファロボット
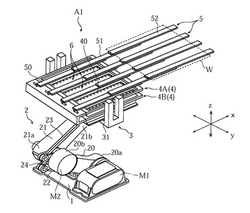
【課題】 ワーク搬送システムのスケールダウンおよび装置の小型化を図ることができ、かつ、ゴミなどの付着を防止しつつワークをスムーズに受け渡しすることができるトランスファロボットを提供する。
【解決手段】 トランスファロボットA1は、上下方向に開放したオープンスペース40をもつフレーム部材4と、オープンスペース40を跨いでフレーム部材4に梁状に設けられているとともに、ワークWの下面を支持しながら水平方向に伸縮する複数のスライドアーム機構5と、複数のスライドアーム機構5と上下方向に干渉することなくオープンスペース40内に収まるように設けられているとともに、フレーム部材4が下降移動して所定の位置にある状態では、相対的にオープンスペース40よりも上方に位置し、その際、ワークWを空気圧により浮上させて保持するエアベントステージ6とを備えている。
(もっと読む)
把持装置

【課題】可動側把持部と定置側把持部の間でワークを把持するのに、可動側把持部の移動案内を振動し難く常に安定した姿勢で行え、可動側把持部の移動装置が故障したときも把持姿勢を維持できる把持装置を提供する。
【解決手段】第1の方向Aに移動自在な移動体10と、移動装置15と、第1の方向に対して直交する第2の方向Bに向ってワーク50を支える定置側把持部21,22と、第1、第2の方向に対して直交する第3の方向Cに沿った軸心36を中心とした揺動方向に揺動自在なアーム部材30と、アーム部材に設けた被案内部37を案内することで、アーム部材を揺動方向および第2の方向に移動するよう案内する案内部材40を備えている。アーム部材に、アーム部材が第2の方向と平行に位置した際に、定置側把持部と対向する可動側把持部26と、移動体に形成したカム部12に案内されるカムフォロア38を設けた。
(もっと読む)
被製版ロールの取り扱い方法、及びロボットハンド
【課題】立て置きされていてかつダンボール紙等の養生材で巻かれている大きさが様々に異なる被製版ロールを横振れを抑えて迅速に吊り上げることができて、高い作業効率が得られる,被製版ロールの取り扱い方法、及びロボットハンド。
【解決手段】CCDカメラにより被チャック孔を検出するとともに、距離センサーにより被製版ロールの端面までの距離を検出し、チャック爪の中心を被チャック孔の中心に位置合わせしかつ前記検出した距離に基づいてチャック爪を移動して被製版ロールの被チャック孔に差し込み、チャック爪を開いてフランジを引っ掛けかつ端面押圧板をロール端面に押付けてチャック爪と共同して被製版ロールの横振れを抑え、養生材押さえプレートにより被製版ロールを巻いている養生材を保持して被製版ロールを吊り上げ・吊り下しする。
(もっと読む)
61 - 63 / 63
[ Back to top ]