
Fターム[3C007EV05]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形しない当接部の形状 (352) | 下面当接 (63)
Fターム[3C007EV05]に分類される特許
21 - 40 / 63
半導体ウエーハ搬送用ハンド
【課題】ウエーハのノッチの位置合せを実行することができ、かつ、径の異なるウエーハを搬送した場合でも、ウエーハ処理装置に対するウエーハの中心位置を位置合せすることができる半導体ウエーハ搬送用ハンドを提供する。
【解決手段】容器からウエーハWを取り出し、ウエーハWを処理する処理装置に搬送する半導体ウエーハ搬送用ハンド10であって、ハンド部材本体12と、ハンド部材本体12に対して移動可能なハンド部材14と、ハンド部材14に対して移動可能な保持部材36と、ウエーハWと接触する第1回転部材24と、第1回転部材24と共にウエーハWを回転させる第2回転部材56と、第1回転部材24と第2回転部材56が相互に離間する方向又は相互に接近する方向に沿って同じ距離だけ移動させる移動手段と、ウエーハWのノッチを検出するノッチ検出手段と、を有する構成とした。
(もっと読む)
ナット把持治具

【課題】ロボットの移動動作によってナットの把持を確実に行うことができるナット把持治具を提供すること。
【解決手段】ナット9を載置するための下治具2と、ロボット8のアーム81に接続される上治具3とよりなる。下治具2は、載置台部と、ナット9の外周面の周方向位置を規制するための外周規制部とを有し、外周規制部は、載置台部に対して軸方向に相対移動可能に配設され、規制位置に向けて付勢されている。上治具3は、アームに接続される基部30と、基部30に対して相対移動可能であると共に付勢力に抗して上記縮小位置に向けて移動した場合にナットのねじ込み方向に回転するよう構成された回転部31と、回転部31に固定され、ナット9を収容可能な把持凹部と、把持凹部に収容されたナット9を保持する保持部とを備えた把持ヘッド部35とを有する。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切換えに要する時間を短縮することができ、構成も簡略化できる基板搬送装置およびそれを用いた基板処理装置を提供する。
【解決手段】搬出入機構4は、複数枚の基板Wを積層状態で一括して保持するバッチハンド40と、このバッチハンド40を進退させるバッチハンド進退機構と、1枚の基板Wを保持する枚葉ハンド39と、この枚葉ハンド39を進退させる枚葉ハンド進退機構と、バッチハンド進退機構および枚葉ハンド進退機構を保持する保持ベース41と、保持ベース41を上下動させる昇降ブロック43と、前記保持ベース41を鉛直方向に沿う旋回ブロック42とを含む。
(もっと読む)
搬送装置および機器の製造方法
【課題】搬送される被搬送物に搬送装置が把持や吸着するための専用の領域を新たに設けることなく、被搬送物を搬送することができる搬送装置を提供する。
【解決手段】 基板搬送装置100は、穴部201が形成された基板200を搬送可能な搬送装置であって、基板200に向けて進退可能に設けられると共に、基板200の表面に位置する穴部201の第1開口部から穴部201内に挿入可能な第1状態と、穴部201内に挿入された状態で、第1開口部と反対側に位置する第2開口部の開口縁部と係合可能な第2状態とに切替可能とされた係止機器140を備える。
(もっと読む)
危険物把持装置
【課題】地中或いは地表に遺棄された対象物の中から目標の対象物のみを確実に把持でき、落下等の発生が確実に防止できる危険物把持装置を提供する。
【解決手段】対象物Wを吸着する真空吸引機構55のバキュームパッド58a〜58dに対し、第1把持爪22及び第2把持爪42の基端側把持爪部23、43をバキュームパッド58a〜58dから離れる上方の開放位置に揺動して目標とする対象物Wとの接触を確実に回避した状態で目標とする対象物Wのみを吸着する。また、把持位置に揺動した第1把持爪22の基端側把持爪部23と第2把持爪42の基端側把持爪部43によって対象物Wを把持すると共に、バキュームパッド58a〜58dと把持位置に揺動した第1把持爪22及び第2把持爪42の各先端側把持爪29、49によって上下方向から対象物Wを把持する。
(もっと読む)
ロボット、ロボットハンドおよびアタッチメント
【課題】 対象物の把持のための微妙な握力調整や位置決め精度を緩和したロボットハンドおよびアタッチメントを提供する。
【解決手段】 互いに接近および離間することによって開閉する一対の把持フィンガー7を備えており、ロボットハンド部6が保持しようとする対象物には、把持フィンガー7が把持するためのアタッチメント41が取り付けられており、前記一対の把持フィンガー7同士の対向する面7aそれぞれに対向する複数個の係止部材14が突設され、前記アタッチメント41の左右の両外表面それぞれに前記係止部材14が係止する複数個の被係止部41aが形成されている。
(もっと読む)
ワークのクランプ装置
【課題】本発明は、複数種類のワークの位置決めが可能な位置決め装置を備えているワークのクランプ装置において、ワークの表面に傷などが発生する虞のない技術を提供することを課題とする。
【解決手段】ワークのクランプ装置10は、開口65hを有するダミー材65とクランプアーム14とピン保持装置20とを備え、このピン保持装置20は、下部プレート45を貫通して下方へ延びている複数の位置決めピン32と、位置決めピン32の後退位置Bと突出位置Tとに設けられている第1係止部55および第2係止部56と、これらの第1係止部55と第2係止部56のいずれかに当接するように位置決めピン32の軸直角方向に移動する挟持プレート57および駆動用のシリンダユニット58と、位置決めピン32を下方に付勢して第2係止部56を挟持プレート57に臨ませるスプリング47とを備える。
(もっと読む)
ワーク把持装置
【課題】構造を簡単とし、ワークの姿勢や形状に応じて確実且つ安定した把持状態とすることができ、コストを低減することができるワーク把持装置を提供する。
【解決手段】ブロック状のワーク2に形成された貫通孔18に挿入する挿入ロッド3と、貫通孔18の一端縁に係止する係止爪7と、係止爪7の反対側からワーク2に当接する当接部材4と、当接部材4を進退駆動して係止爪7と当接部材4とによりワーク2を把持させる当接部材駆動手段13とを備える。当接部材4は、挿入ロッド3の軸線に対して直行する角度に形成された第1当接面10と、挿入ロッド3から離間した位置において挿入ロッド3の軸線に対して傾斜する第2当接面11とを備える。係止爪7と当接部材4とによりワーク2を把持したとき、第1当接面10と第2当接面11との少なくとも一方がワーク2に当接する。
(もっと読む)
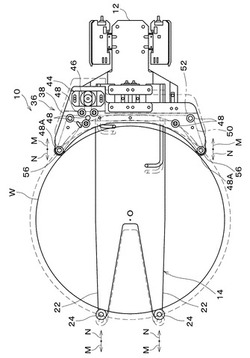
積付装置および積付方法
【課題】適切な積付作業ができる積付装置を提供する。
【解決手段】積付装置1は、回動部10を有する装置本体4を備える。回動部10にはベース体12を回動可能に設ける。ベース体12には、物品Wを両側方から挟持する固定挟持体23および可動挟持体31を設ける。ベース体12には、物品Wの下面を支持する下面支持体41を移動可能に設ける。積付作業時には、保持物品Wを積付物品Wの上方位置に平面視で保持物品Wが積付物品Wに対して傾斜した状態でかつ保持物品Wの一角部と積付物品Wの一角部とが平面視で一致した状態になるように位置させる。次いで保持物品Wの一部のみを積付物品W上に載せた後、平面視で保持物品Wの積付物品Wに対する傾斜をなくし、その後、下面支持体を移動させて保持物品を積付物品上に互いに嵌合した状態に積み付ける。
(もっと読む)
ドア取り外しシステム
【課題】ドアをボディから取り外して搬送する際に、ドアやボディが損傷するのを防止できるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステム1は、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステム1は、ドア11を把持しかつ略鉛直方向を旋回軸213として旋回可能な双腕ロボット20と、この旋回軸213に作用するトルクを検出するトルクセンサ214と、双腕ロボット20を制御する制御装置と、を備える。制御装置は、双腕ロボット20によりドア11を把持した状態で、この双腕ロボット20を旋回軸213で旋回させる際、トルクセンサ214により旋回軸213に作用するトルクを検出し、この検出したトルクが所定値以上である場合には、双腕ロボット20の旋回を停止する。
(もっと読む)
基板保持機構およびそれを用いた露光装置並びにデバイス製造方法
【課題】 基板の両面を同時に保持することにより、保持面積の拡大、保持力の向上を図ると共に、基板受け渡し面のチルト補正の容易化、基板の面精度の維持を可能にし、装置全体の基板搬送スループット向上、および搬送精度の向上を実現する。
【解決手段】 基板8の両面の一方を吸着する第1保持部2,3と、他方に当接してそれを支持する第2保持部6,7と、基板を吸着した第1保持部を第2保持部側へ付勢する付勢手段4,5とで基板保持機構1を構成する。
(もっと読む)
エンドエフェクタ及びそれを備えた搬送装置
【課題】1個のエンドエフェクタにおいて、ウェハを2枚搬送することができるようにする。
【解決手段】ウェハを把持する把持機構を備えたエンドエフェクタ3において、エンドエフェクタ3の上面に把持機構を備え、上面の裏面にも把持機構を備え、エンドエフェクタの上面及び裏面の両方でウェハを把持可能に構成する。
(もっと読む)
搬送装置、搬送方法、およびデバイス製造方法
【課題】熱などの諸要因によって被保持面が変形した被保持体を、より確実に保持した状態で搬送することができる搬送装置、および搬送方法を提供すること。
【解決手段】被保持物の被保持面に対して保持面を当接させて前記被保持物を保持した状態で搬送する搬送アームAにおいて、該搬送アームAに、ウエハ吸着孔6が設けられたウエハ支持部2を設けるとともに、該ウエハ支持部2をウエハ支持部2の基端部2aを中心に所定の幅だけ回動自在に構成した。
(もっと読む)
搬送対象物搬送用マニピュレータとその方法
【課題】薄板物品を落下させることなく安定して搬送することができるようにするとともに、多数同時搬送と、物品を密集して積み付けることができるハンド装置を備えたマニピュレータを提供する。
【解決手段】少なくとも一対の把持部材3を備え、該把持部材3の互いが接近するよう水平方向に駆動する把持部材駆動部5とをハンド装置30に備え、把持部材3の狭持動作によって物品Aを挟持して移送する物品搬送用マニピュレータにおいて、把持部材3からまたは把持部材3の下面から突出して薄板物品Aの下面を掛止する可動受爪37と、把持部材3の薄板物品Aの非把持側に突出させることなく、可動受爪37を把持部材3の内部または下面に収納する受爪駆動部4と、前記把持部材内側面から突出して薄板の浮き上がりを掛止する固定受爪36と、をハンド装置30に備えた。
(もっと読む)
ロボットハンド及びそれを備えたロボット
【課題】仮組みが必要な部品の組立作業に使用されるロボットにおいて、第2の部品を第1の部品に対して仮組みできるハンドの構造を開示し、第2の部品を仮組みした後、第2の部品を仮組みしたロボットのハンドが他の作業に使用できるようにする。
【解決手段】ロボットハンドが、ロボットのアーム先端22に固定され、把持動作が可能な一対の把持部材を備えた第1のハンド21と、第1のハンド21によって把持されたときに保持ツメ16を閉じることができる第2のハンド10と、から構成され、第2の部品の穴と第1の部品の穴に挿入された第2のハンド10が、第1のハンド21によって離されたとき、保持ツメ16が付勢手段13によって開き、第2の部品が第1の部品に対して係止されるよう構成した。
(もっと読む)
基板を搬送するためのエンドエフェクタおよびロボット
基板搬送ロボットのエンドエフェクタが、繊維強化プラスチック(FRP)から製造された上プレートと、繊維強化プラスチック(FRP)から製造された下プレートと、上プレートと下プレートとの間に配置され、アルミニウム、ステンレス鋼およびハニカム形繊維強化プラスチック(FRP)からなる群から選択された中間部材とを備える。さらに、基板搬送ロボットが上記のエンドエフェクタを備えている。  (もっと読む)
(もっと読む)
ロボットハンド、及びロボット
【課題】異なる形状のワークを簡便に把持することができるロボットハンド、及びロボットを提供すること。
【解決手段】本発明の一態様にかかるロボットハンドは、ベースプレート38と、ベースプレート38に固定され、コンロッド20の位置を規制する可動基準ピン32と、可動基準ピン32によって位置決めされたコンロッドを両側から把持する1対の可動爪30と、1対の可動爪に対応して設けられ、可動爪30が固定された1対のスライド板39と、スライド板39を移動して、1対の可動爪30の間隔を変化させるアクチュエータ36と、を備え、ベースプレートに対する可動基準ピン32の固定位置が可変であり、スライド板39に対する可動爪30の固定位置が可変であるものである。
(もっと読む)
基板容器用ロボットハンドと蓋付基板容器
【課題】容器及び蓋からなる薄い基板容器を、容器に挟み込む力を作用させることなくハンドリングして、炉内に積層して載置し、炉内から搬出することができ、これにより基板の汚染を防止しながら水蒸気アニール処理をし、かつ炉内処理領域への基板のセット数を高めて、スループットを高めることができる基板容器用ロボットハンドと蓋付基板容器を提供する。
【解決手段】水平に位置する蓋付基板容器3の外縁に沿って延び、水平かつ対向して互いに平行に拡縮可能な1対の容器支持枠12と、容器支持枠を蓋付基板容器の外縁に近接する縮小位置Cと離れた拡大位置Oとの間で移動させる支持枠駆動装置14と、支持枠駆動装置を支持し、容器支持枠を間隔を隔てて水平に囲む枠部材16とを備える。蓋付基板容器3は、その外周の少なくとも一部に所定角度のテーパ下面3cを有し、1対の容器支持枠12は、縮小位置においてテーパ下面に近接しかつ同一角度のテーパ上面12aを有する。
(もっと読む)
ワークハンド装置およびワークハンド装置の段取りに使用する段取り台、その段取り方法ならびにワークハンド装置を使用したワーク搬送方法
【課題】特定ワークの専用品とせず、汎用性の高いワークハンド装置を提供する。
【解決手段】ロボット20のアーム21の先端に接続され、アーム21の旋回、伸縮によ
ってワークWを搬送するワークハンド装置1″であり、フレーム2にワークWを位置決めする基準ピン3a,4a,5aと、この基準ピンに内蔵され、ワークWを把持するクランパー3b,4b,5bと、それぞれの基準ピンとクランパー3b,4b,5bを有するそれぞれの第1、第2、第3ピンクランパーユニット3,4,5とを備え、第1ピンクランパーユニット3をX軸方向の位置を固定する第1固定手段9と、第2、第3ピンクランパーユニット4,5をY軸方向へ移動する第2駆動手段7と、第2、第3ピンクランパーユニット4,5をZ軸方向の位置を固定する第2、3固定手段11,12と、Z軸の先端方向へ付勢する第2、3付勢手段11c,12cとを備えたワークハンド装置1″である。
(もっと読む)
基板処理システム、基板搬送装置、基板搬送方法、および記録媒体
【課題】搬送中における基板に対して適切な処置を施すことができる基板搬送装置を提供する。
【解決手段】基板搬送装置50は、第1基板収容部20と第2基板収容部30との間を移動可能なフォーク支持体51と、フォーク支持体に移動可能に支持されたフォーク60,65と、を備える。フォークは、第1基板収容部から第2基板収容部へ搬送される基板を第1支持位置において支持し、第2基板収容部から第1基板収容部へ搬送される基板を第1支持位置とは異なる第2支持位置において支持する。第1支持位置に基板を支持したフォークは、フォーク支持体の移動中に第1待機位置に配置され、第2支持位置に基板を支持したフォークは、フォーク支持体の移動中に第1待機位置とは異なる第2待機位置に配置される。
(もっと読む)
21 - 40 / 63
[ Back to top ]