
Fターム[3C007WC20]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | 付属品の構成の特徴 (42) | 置台、ステーション (18)
Fターム[3C007WC20]に分類される特許
1 - 18 / 18
移動体の充電装置及びその制御方法
【課題】一方の引張り出し検知センサが故障した場合であっても、配線部材が所定以上に引張り出されたとき、異常処理を行うことが可能な移動体の充電装置を提供する。
【解決手段】充電スタンド2は、ケーブル5aの第1の引張り出しを検知する第1の引張り出し検知センサ7と、ケーブル5aの第2の引張り出しを検知する第2の引張り出し検知センサ8を備える。制御装置4は、第1の引張り出し検知センサ7による検知に基づいて第1の制御指令を出力し、第2の引張り出し検知センサ8による検知に基づいて第2の制御指令を出力する。
(もっと読む)
充電装置

【課題】より正確に自律移動ロボットに認識され得る充電装置を提供する。
【解決手段】自律的に充電を行う自律移動ロボットに認識される光を発光する光源を備えた充電装置であって、光源を格納する筐体の一部であって、光源が発光する光を透過させる透過面を備え、透過面は、当該面における筐体外部方向の法線が水平に対し斜め下向きとなるように形成されている充電装置。本発明によれば、自律移動ロボットが充電装置をより正確に認識することができる。
(もっと読む)
車輪位置決め機構
【課題】 本発明は、走行型ロボットに対する車輪位置決め機構に関し、より詳細には走行型ロボットの駆動輪に当接して走行型ロボットの進入方向および左右の位置ずれを自動修正する車輪位置決め機構に関する。
【解決手段】 本発明の車輪位置決め機構は、走行型ロボットの駆動輪の間隔に合わせて所定形状の2個の穴が形成された位置決め台と、フラットローラとテーパローラとを配置した2連ローラとを有し、2連ローラは位置決め台の穴に回転軸を相対して配置され、2連ローラの上部は位置決め台の上面から所定高さ露出して駆動輪に当接して回転可能とし、テーパローラは位置決め台の外側に対して大きいローラ径となる向きに配置され、さらにフラットローラに対して走行型ロボットの進入側に配置する、よう構成する。
(もっと読む)
ロボット
【課題】対象物体との相互作用を伴う指定タスクを実行する観点から、基体の位置等を適当に調節することができるロボットを提供する。
【解決手段】基体10の位置および姿勢を「第2目標軌道」にしたがわせながら、ロボット1が第1指定エリアから第2指定エリアに移動した上で立ち止まる。また、この状態において第2位置偏差(=第2目標位置に対する基体の位置の偏差)と、第2姿勢偏差(=第2目標姿勢に対する基体の姿勢の偏差)とが測定される。そして、当該測定結果に基づき、次回の第2位置偏差等が小さくなるように第2目標軌道が補正される。これにより、ロボット1が将来に第1指定エリアから第2指定エリアに移動した上で立ち止まった状態における基体10の次回位置等が、ロボット1が過去において第1指定エリアから第2指定エリアに移動した上で立ち止まった状態における基体10の今回位置等よりも第2目標位置等に近づけられる。
(もっと読む)
目標経路設定支援システム
【課題】ロボットが物体との接触を回避する限りにおいて、ユーザが希望するポイントを可能が限り経由させながらロボットを移動させることができるシステムを提供する。
【解決手段】目標経路にしたがって自律的に移動するロボットRのための当該目標経路をユーザが設定することを支援するための目標経路設定支援システムは、ユーザによりリモコン300を介して指定されたノードまたはノード同士を結ぶリンクを指定経由部として認識し、目的位置を終点として認識し、出発位置を始点として認識する経由部・始終点認識手段110と、指定経由部を少なくとも部分的に包含するように終点と始点とを結ぶ移動候補経路を作成する候補経路作成手段120と、移動候補経路に沿ってロボットRを移動させた場合に物体の位置および広がりに関する情報に照らして、ロボットRと物体との接触可能性の高低または有無を判定し、該判定結果を出力装置を介して出力する判定手段130とを備える。
(もっと読む)
昇降装置と被昇降体との連結構造
【課題】被昇降体の左右両外側で昇降する一対の昇降体に、被昇降体の各側部を連結する昇降装置と被昇降体との連結構造において、作業性を向上させると共に安定性を向上させる。
【解決手段】被昇降体1の各側部に設けられ各昇降体20の昇降アーム部20dを把持する把持手段3を、ベース枠30に揺動自在に連結された第1把持片31と、第1把持片31に揺動自在に連結された第2把持片32とで構成し、昇降アーム部20dと被昇降体1とが分離した状態で、第1把持片31が昇降アーム部20dの上下方向の投影空間の外方に位置すると共に、把持部32bが昇降アーム部20dの上下方向の投影空間内に位置し、昇降アーム部20dの上昇で昇降アーム部20dが第2把持片32を押し上げることにより、第1把持片31が第2把持片32を介して引き上げられて、把持部31aが下方から昇降アーム部20dに当接する。
(もっと読む)
ロボット盗難防止システム
【課題】ロボットの盗難を防止し、卓上からの落下を防止し、汎用性や作業性に優れ、セキュリティを確保すること。
【解決手段】ロボットを自走させずに卓上で使用するときに、台の上面部にロボットが搭載される。上プレートは、台の上面部の中央部から台の端部に延び、台の端部に対応する部分に上カギ穴が設けられ、インサート部とネジ穴とに対応する部分に貫通孔が設けられている。ネジは、工具が接触する部分である頭部と、台のネジ穴に挿入される突起部とを有し、ネジ穴、貫通孔を介してインサート部に固定する。下プレートは、台の下面部の中央部から台の端部に延び、台の端部に対応する部分に下カギ穴が設けられている。この下プレートは、上カギ穴と下カギ穴とが重なるように台の下面部に設けられ、ネジの頭部を覆い隠す。ワイヤー付きロック部のカギにより、上カギ穴及び下カギ穴に挿入して下プレートを台と上プレートとに固定する。
(もっと読む)
ロボット充電システム
【課題】接合箇所に対する損傷を低減することができるロボット充電システムを提供すること。
【解決手段】ロボットは、ロボット処理部とバッテリとロボット側接合部とを具備している。充電ステーションは、台と、台の一端部に設けられたステーション側接合部と、台上に設けられた走行路と、台上に走行路に対して平行に設けられたパターンテープと、を具備している。パターンテープは、第1〜第3パターンが台の他端部からステーション側接合部に向かってこの順に表記されている。ロボット処理部は、第1パターンを読み取ったとき、ロボットを走行路に搭乗させて走行路上を走行させ(第1制御処理)、第2パターンを読み取ったとき、走行路上を走行するロボットを減速させ(第2制御処理)、第3パターンを読み取ったとき、走行路上を減速するロボットを停止させ、ロボット側接合部とステーション側接合部とを接合する(第3制御処理)。
(もっと読む)
充電装置
【課題】ロボットがその複数の脚部により立った状態で安定に静止した状態を維持しながら、当該ロボットに搭載されているバッテリを充電することができる装置を提供する。
【解決手段】第1コネクタ12が後退駆動されたにもかかわらず第1コネクタ12および第2コネクタ22が接続されたままだと、ロボット2の基体P0が第1コネクタ12に引っ張られるように傾斜する。しかるに、この状態では第1信号用端子124および第2信号用端子224の接続状態が維持されていることを利用して、ロボット2の姿勢が不安定になる事態が回避されうる。すなわち、充電制御部11が第1信号用端子124および第2信号用端子224を介して制御システム21と通信することが可能な状況では第1コネクタ12の後退駆動が制限される。したがって、第1コネクタ12が無条件で後退駆動されることによりロボット2の姿勢が不安定になる事態が回避されうる
(もっと読む)
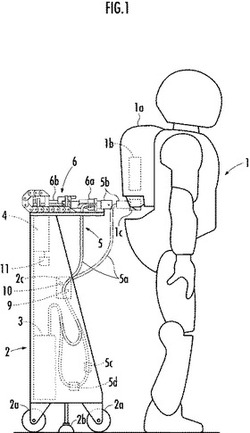
充電装置
【課題】ロボットが有する受電コネクタへの給電コネクタの当接による当該ロボットの姿勢不安定を回避しながら、当該ロボットに搭載されているバッテリを充電しうる装置を提供する。
【解決手段】本発明の充電装置1によれば、給電コネクタ12が起立状態にあるロボット2の受電コネクタ22に接続することによってロボットの目標ZMPまわりに生じるモーメントが、当該目標ZMPまわりに発生しうる床反力モーメントの範囲に収まるように給電コネクタの動きが制御される。
(もっと読む)
脚式移動ロボットの充電システム
【課題】脚式移動ロボットの充電システムにおいて、充電の際の位置決めが容易でロボット側に負担を生じさせることのない充電システムを提供する。
【解決手段】充電システムは、ロボット1側に設けられたバッテリ2、受電コネクタ4及びリアカバー3を開閉自在の可動シャッタ部5、充電ステーション20側に設けられたホルダ21、給電コネクタ22、スライド機構23、ベースプレート25、充電用電源26等を備える。ロボット1はベースプレート25上で所定の位置決めを行い、その重心を後方に移動させて受電コネクタ4と給電コネクタ22との接続を行う。その際、ロボット1のリアカバー3がホルダ21の第1ガイド部21aに案内されると、スライド機構23によってホルダ21が水平方向に移動される。これにより、ロボット1側と充電ステーション20との間に多少のずれがあっても、ロボット1側の位置決め制御が容易なものとなる。
(もっと読む)
充電システム、充電ステーション及びロボット誘導システム
【課題】自律移動ロボットを充電ステーションに確実に導く。
【解決手段】バッテリ17の電力で移動する自律移動ロボット10と、バッテリ17に充電する充電ステーション20とからなる充電システム1において、充電ステーション20は、床面上の投光位置にガイドマークGML,GMRを投光する発光部22L,22Rを備え、自律移動ロボット10は、床面を撮像する撮像手段13と、自律移動ロボットを全体的に制御する制御手段11と、自律移動ロボットが充電ステーションに接近した所定の目標視界位置において所定の姿勢で撮像手段が予め撮像したガイドマークの画像データを目標視界画像データとして記憶する記憶手段11Aと、を備え、制御手段は、撮像手段で撮像したガイドマークの入力画像データと、記憶手段に記憶された目標視界画像データと、を比較し、両データが略一致するように自律移動ロボットを移動させる。
(もっと読む)
自律走行ロボットシステム
【課題】充電ステーションは自律移動ロボットの内蔵バッテリーが消耗した時に充電する以外の作業は行っておらず、センサ部が正常に機能しているかなどの点検作業を行ってくれるものは存在しなかった。
【解決手段】外界の情報を入力する外界情報入力手段9、10と電源13を有し自律走行する自律走行装置8と、電源13に商用電源から電力を供給する電力供給手段17を有する充電装置16を備え、充電装置16の電力供給手段17が自律走行装置8の電源13に電力を供給している間に、点検手段19が自律走行装置8の外界情報入力手段9、10が正常に動作しているか点検作業を実施することができるので、常に安全な状態で走行を開始することができる。
(もっと読む)
ロボット充電誘導システム
【課題】 別途に通信手段を設けることなく、必要なときだけ誘導信号を発信して、ロボットを充電装置に誘導するロボット充電誘導システムを提供する。
【解決手段】 ロボット20は、発信方向ごとに異なる信号パターンを有する指向性の探索信号を発信する方向別探索信号発信部33と、充電装置から発信される応答信号を受信する応答信号受信部34とを備え、充電装置40は、ロボット20からの探索信号を受信する探索信号受信部44と、受信した探索信号に含まれる信号パターンを抽出する信号パターン抽出部49と、抽出した信号パターンに対応した信号パターンを有する非指向性の応答信号を作成して発信する非指向性応答信号発信部45とを備え、ロボット20は応答信号受信部34が受信した応答信号に含まれる信号パターンに基づいて充電装置の方向を特定する方向特定部38と、特定された方向にロボットを移動する移動機構35とを備える構造とする。
(もっと読む)
ロボットにおける首軸の較正方法及び装置と該装値を備えたロボット製造システム
【課題】 略人型をし、頭部を前後(ピッチ方向)左右(ロール方向)に傾けたり振り返り動作(首を中心とした回動動作、ヨー方向)を可能とする3軸を有したロボットにおける首軸を、簡単、安価な構成で容易に較正、調整ができるようにしたロボットにおける首軸の較正方法及び装置と該装値を備えたロボット製造システムを提供することが課題である。
【解決手段】 頭頂に全方位撮像可能な撮像装置と、首部に、頭部を前後左右の傾斜と首を中心とした回動を可能とする3軸が設けられたロボットにおいて、少なくとも2本以上の棒状部材が垂直に設けられ、前記撮像装置で撮像したとき、前記棒状部材の像の延長線が180度以下の角度で交差するよう配置された首軸の較正装置の略中央に前記ロボットを、前記ロボットにおける前記撮像装置が棒状部材と略等距離になる位置に設置し、前記撮像装置で撮像した棒状部材の交点が撮像画像中心となるよう頭部を傾斜させて較正する。
(もっと読む)
自律移動型ロボットにおける充電ステーション
【課題】 充電ステーションに誘導された自律移動型ロボットの充電端子と、充電ステーション側の給電端子を確実に接続できるようにし、かつ、ロボット側充電端子がロボットの意匠に支障を来すことがない程度に小型であり、充電ステーション側充電装置は構造が簡単で安価、それでいて感電やショート、汚れによる導通不良などを起こさないようにした、自律移動型ロボットにおける充電ステーションを提供することが課題である。
【解決手段】 充電ステーションに給電端子を有した充電装置と、該充電装置に対して前記ロボット進入側に、ロボット側駆動輪を制御して前記給電端子とロボット側充電端子との間隔とロボット進入角度を制御して、給電端子と充電端子とをほぼ対面させる進入角度修正手段を設けた。
(もっと読む)
物品搬送ロボット及びクリーン搬送システム
【課題】 物品の搬送路を格別にクリーンな環境に保つことなく、かつ物品を塵埃等で汚染させることなく搬送する。
【解決手段】 一方のクリーンエリア10からパスボックス22を介して受け出した物品20をマニュピレータ18で把持して搬送路14を走行し、物品20をパスボックス28を介して他方のクリーンエリア12に搬送する物品搬送ロボット16及びクリーン搬送システムであって、前記マニュピレータ18の先端に物品20の周囲を清浄に保つクリーン化装置34が装備されている。
(もっと読む)
2足歩行ロボットの充電システム
【課題】2足歩行ロボットのバッテリの充電を、2足歩行ロボットの姿勢を安定させ、火花放電やノイズの発生を防止して行う充電システムを提供する。
【解決手段】2足歩行ロボット10に備えられたバッテリ11を充電する充電システムであって、充電装置1は、2足歩行ロボットを着座姿勢に保持する着座保持手段2と、2足歩行ロボット10が着座保持手段2に着座したときに2足歩行ロボット10に設けられた受電コネクタ12と嵌合する給電コネクタ3とを備え、また、受電コネクタ12と給電コネクタ3が接続状態にあるか否かを検知する接続状態検知手段と、バッテリ11に対する充電電流を出力する充電用電源と、接続状態検知手段により受電コネクタ12と給電コネクタ3が接続状態にあることが検知されたときに、該充電用電源からバッテリ11に充電電流を供給してバッテリ11を充電する充電制御手段とを有する充電ユニット4を備える。
(もっと読む)
1 - 18 / 18
[ Back to top ]