
Fターム[3C030DA03]の内容
自動組立 (6,729) | 搬送・組立ライン一般 (2,452) | 検査、検知 (202) | ラインにおける異常 (9)
Fターム[3C030DA03]に分類される特許
1 - 9 / 9
部品組立装置
ロボット制御方法およびロボット制御システム
【課題】主として部品供給トレイなどに搭載された作業対象部品などの位置ずれに起因する「チョコ停」の未然防止を可能とするロボット制御方法およびロボット制御システムを提供する。
【解決手段】ロボット制御方法の一実施形態では、ロボットハンド31の1つ以上の作業対象部品が搭載された部品供給トレイ5が、所定位置に載置された状態で、作業対象部品のすべてが含まれるように撮像し、撮像された画像データから作業対象部品それぞれを検出するとともに、検出された作業対象部品それぞれの正常位置に対する位置誤差が許容範囲内か否かを判定する。位置誤差が許容範囲内と判定された作業対象部品に対しては通常作業を実行するが、位置誤差が許容範囲内ではないと判定された作業対象部品に対しては通常作業を実行しない。
(もっと読む)
外部操作ハンドガイド装置とその制御方法

【課題】装置の可動範囲内で組付作業を完了することができる外部操作ハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボットエリアと組立ラインの間に、ハンド14が移動可能な作業エリアとハンドが侵入できない安全エリアとが隣接して設けられ、オンハンド操作盤18は、作業対象物にワークを組付ける際に、作業エリア内に位置するように設定されている。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有している。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付を完了できるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ハンド14は、作業対象物2にワーク3を組付ける際に、オンハンド操作盤18が作業対象物からロボットの反対側に突出する長さを有している。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
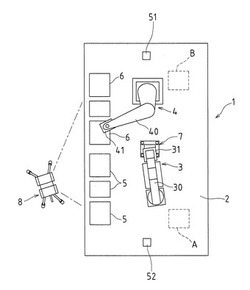
フレキシブル生産システム
【課題】セル生産方式のフレキシブル生産システムにおいて、人の生産性は落とすことなく容易かつ柔軟にシステムの再編成を可能とする人機械協調型のシステムを実現して生産性向上を図る。
【解決手段】本システム1は人セル部11に隣接する機械部12を備え、機械部12は移載するための複数のハンド部21と、ハンド部21を移動させる複数のアクチュエータ22と、ハンド部21の移動の方向に沿って配置され、部品に処理を施す複数の処理装置3と、人セル部11側から機械部12に部品を投入するための投入部4と、機械部12から人セル部11側に部品を取り出すための取出部5と、投入部4から各処理装置3を経由して取出部5に至る部品の順路の途中に人セル部11側から追加部品を投入し供給するための途中部品搬入装置6とを備えている。途中部品搬入装置6を備えることにより、人セル部11と機械部12とを分離したシステムを容易かつ柔軟に構成できる。
(もっと読む)
組み立てシステム
【課題】1つのラインで異なる種類の自動車部品を組み立てつつ、設備スペースを削減できる組み立てシステムを提供すること。
【解決手段】組立てシステム1は、本体および部品でそれぞれ構成される複数種類の自動車部品を組み立てる。この組み立てシステム1は、前記複数種類の自動車部品のそれぞれの本体および部品が載置されて走行する複数の走行台車21〜24と、複数種類の自動車部品のそれぞれの部品が載置された複数の部品用パレット30と、部品用パレット30を搬送するベルトコンベア40と、作業者が配置されるメインライン50と、このメインライン50からオフセットされて、ロボットRB1〜RB5が配置されるバイパスライン80と、これらを制御する制御装置60と、を備える。制御装置60は、メインライン50およびバイパスライン80のうち少なくとも1つにより走行台車21〜24の搬送経路を設定する。
(もっと読む)
チューブ搬送装置
【課題】所定長さに切断した扁平チューブを1本ずつ整列して搬送できるチューブ搬送装置を提供する。
【解決手段】所定長さの多数のチューブを、積み重ねて貯留する貯留機構と、該貯留機構内のチューブを引っ掛けて搬出する搬出機構と、該搬出機構により搬出されたチューブを移送する移送機構とからなるチューブ搬送装置において、
上記搬出機構が、外周にチューブを1本ずつ引っ掛けて搬出するためのL字型の段状引っ掛け部が丸鋸歯状に周方向に複数設けられた回転体を備え、
扁平チューブが、前記回転体の上端位置で前記段状引っ掛け部から搬送装置のスクリュウ溝に嵌まり込むようにした。
(もっと読む)
組立装置
【課題】一つの組立機が故障停止した時に、隣接する組立機等の運転を停止することなく故障復旧作業を行うことが可能な、組立装置を提供する。
【解決手段】互いに隣接して設けた、第1〜第3組立機11a〜11c間に、被加工物Wを前記組立機11a〜11cに搬送する、第1〜第3回動型被加工物搬送手段12a〜12cを設ける。前記第1〜第3回動型被加工物搬送手段12a〜12cは、前記第1〜第3組立機11a〜11cの互いの側面における固定用安全カバーCfを開口して設ける。
また前記第1〜第3回動型被加工物搬送手段12a〜12cは、それぞれ180度、回動可能に支持すると共に、被加工物Wを載置して搬送する回動基体13a〜13cを備え、これら回動基体13a〜13cには、それぞれ中央に仕切板14a〜14cを設ける。
(もっと読む)
工場の組立ラインにおける異常管理システム
【課題】 組立ラインの工程で発生する不具合に対して安価な構成で対応できるようにし、さらに、組立ラインの各工程の間隔を変更した場合でも、容易に対応することができる工場の組立ラインにおける異常管理システムを提供する。
【解決手段】 各工程6a,6b,6cに対応して紐スイッチ8a,8b,8cと警報ランプ9a,9b,9cを設置し、例えば工程6aで不具合が発生した場合、作業者が紐スイッチ8aを引くことにより、工程群制御装置11に不具合発生信号が入力されると同時にタイマが作動して、不具合発生信号が発せられた工程6aに対応する警報ランプ9aに点灯信号を出力して点灯させるとともに警報ブザー26を鳴動させ、また、タイマの作動開始から所定時間内に紐スイッチ8aが再度引かれて不具合解消信号が入力されると、この工程6aに対応する警報ランプ9aに消灯信号を出力して消灯させるとともに警報ブザー26の鳴動を停止させる。
(もっと読む)
1 - 9 / 9
[ Back to top ]