
Fターム[3C269MN48]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318) | 画像信号の利用 (48) | 三次元画像 (14)
Fターム[3C269MN48]に分類される特許
1 - 14 / 14
6軸ロボットの軸間オフセット検出方法
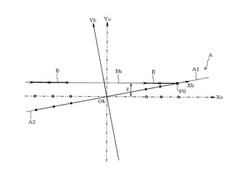
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、先端2軸直交点(第5軸と第6軸との交点)をロボット座標のX軸上の複数の移動目標位置(白抜き丸印)に移動させる。各移動目標位置で、発光ダイオードを第6軸を中心に回転させてその回転軌跡を3次元計測器により計測すると共に、発光ダイオードを第5軸を中心に回転させてその回転軌跡を3次元計測器により計測する。そして、2つの回転軌跡から2つの回転中心線を求め、両回転中心線の交点を先端2軸直交点の実際の移動位置(×印)とし、移動目標位置と実際の移動位置との誤差から軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
加工ユニットの動作を表示し、ユーザ入力から処理データを生成する仮想工作機械
作業スペース(30)及びこの作業スペースに配置された加工ユニット(36)を有する工作機械の制御システムの処理を容易にするため、制御システムは、処理データ及び記憶された機械モデル(48)に基づき、少なくとも作業スペース(30)の領域内において、可視化要素(G,FF)によって可視化ユニット(50)上で、仮想作業スペース(54)内に設けられた仮想加工ユニット(56)を有する仮想工作機械として実際の工作機械(12)を表示すると共に、仮想加工ユニットの機能を仮想機能として表示する可視化コントローラ(36)を備える。マニュアル対話処理を可能とする対話処理ユニット(80)は可視化ユニット(50)と関連付けされ、マニュアル対話処理によって工作機械の機能の関連性を可能とする機能選択ユニット(90)が可視化ユニット(50)と関連付けされ、関連した機能を考慮しながら、マニュアル対話処理に対応する処理データ(ML,MST)を生成すると共に、可視化要素(G,FF)を使用しながら、可視化ユニット(50)上で、マニュアル対話処理によって特定された機能を表示するために、処理データ(ML,MST)を可視化コントローラ(40)に対して転送する処理データ(ML,MST)を生成する機能データ生成ユニット(92)を備える。  (もっと読む)
(もっと読む)
ロボットオフラインプログラミング装置

【課題】実機と同じ動作をするシミュレーションが可能なオフラインプログラミング装置を提供する。
【解決手段】ロボットオフラインプログラミング装置28は、NCシミュレータ10の第1通信モジュール26と通信回線24により接続され、第1通信モジュール26と信号等の情報の通信を行う第2通信モジュール30と、前記情報に基づいてロボットのシミュレーションを行うロボットシミュレーション装置すなわちロボットシミュレータ32と、ロボットシミュレータ32でのシミュレーション結果を用いてオフラインで教示プログラムを作成するプログラム作成装置34とを有する。ロボットシミュレータ32には、シミュレーション対象についての3次元CADモデルや仕様を表すデータが格納される。
(もっと読む)
工作機械用制御装置
【課題】コストを抑えながらも、操作者の熟練度に左右されず直感的に素早く操作が行えるようにした工作機械用制御装置を提供する。
【解決手段】工作機械を制御する工作機械制御手段53と、三次元形状モデルをシミュレート動作させるシミュレート手段54と、三次元形状モデルを表示するモデル表示手段55とを備えた工作機械用制御装置50において、工作機械の自動運転時に行われる一連の動作を個々の動作に分割した各個動作で動作させる部位の三次元形状モデルごとに作業順番を表示する作業順番表示手段56と、作業順番が表示された三次元形状モデルが選択されると選択された三次元形状モデルに対応する部位を動作させるメニューを表示するメニュー表示手段57と、表示されたメニューが操作されると操作されたメニューに対応する動作となるように選択された三次元形状モデルに対応する部位を制御する部位制御手段61とを有する。
(もっと読む)
シミュレーション装置
【課題】別個の指令プログラムに基づいて動作するロボットと工作機械のシミュレーション結果を表示装置に表示できるようにしたシミュレーション装置を提供する。
【解決手段】シミュレーション装置10は、経過時刻を指定するシミュレーション管理部24と、指定経過時刻まで動作プログラムを実行さて、指定経過時刻におけるロボットの動作位置を求めるロボット動作演算部12と、加工プログラムを連続的に実行しながら工作機械の動作位置を逐次求めていく工作機械動作演算部14と、単位時間が経過するたびに、求められた工作機械の動作位置を経過時刻と対応付けて記憶する工作機械動作記憶部18とを備える。シミュレーション管理部は、ロボット動作演算部と工作機械動作演算部から取得した指定経過時刻におけるロボットと工作機械の動作位置に基づいて、ロボット及び工作機械の三次元モデルを表示装置26上に表示させる。
(もっと読む)
工作機械用制御装置および工作機械用制御方法
【課題】異常部位の表示を行うための登録作業について従来よりも時間と労力を軽減できる工作機械用制御装置および工作機械用制御方法を提供する。
【解決手段】工作機械用制御装置10は、工作機械制御手段13(制御手段)と、シミュレート手段14と、モデル表示手段15と、識別手段16と、強調表示手段17と、異常情報表示手段18とを備える。さらに、異常部位と視点との間に干渉物が存在するか否かを判断する干渉物判断手段19と、干渉物があると判断された場合には干渉率が最小となる視点を捜索する視点捜索手段20と、捜索された視点に位置を変更する視点変更手段21と、変更された視点について干渉率が許容値を超える場合には当該干渉率が許容値以下となるように干渉物の表示形態を変更して表示し干渉率が許容値以下の場合には干渉物をそのまま表示する干渉物表示変更手段22とを有する。
(もっと読む)
制御装置
【課題】プログラマブルコントローラで制御される数値制御機械のシミュレーションの容易化。
【解決手段】プログラマブルコントローラは、外部出力要素に連動して動作する内部出力要素と、その外部出力要素のオンオフ状態を変化させた場合に、その後、状態の変化が予定されている外部入力要素に対して、内部出力要素の動作に連動して仮想入力値を与える模擬制御ロジックが組み込まれたシーケンスプログラムを有している。シミュレーション指令が付与された時には、プログラマブルコントローラに対して、外部出力要素に対応した全ての外部リレーを動作させず、外部接点のオンオフ状態を外部入力要素に読み込まないことを指令する入出力遮断指令手段を有する。シミュレーション指令が付与された時には、入出力遮断指令手段による指令の実行の後、プログラマブルコントローラに対して、模擬制御ロジックを起動することを指令する模擬制御ロジック起動手段とを有する。
(もっと読む)
ロボットのシミュレーション方法及びロボットのシミュレーション装置
【課題】ロボットのシミュレーションをより容易に、しかもそのためのプログラムやデー
タの管理についてもその簡略化を図ることのできるロボットのシミュレーション方法及び
ロボットのシミュレーション装置を提供する。
【解決手段】ロボット10を構成する多関節型のロボットとしてのロボット駆動部11の
構造及び属性等に関する情報を初期のロボットデータとして当該ロボット10内のコント
ローラ12の記憶部12Bに格納しておく。そして、ティーチングによる指示や手動の操
作、又はロボット駆動部11の動作内容が規定された制御プログラム等に基づいて当該ロ
ボット駆動部11の移動経路を含む動作を、同ロボット10内でロボットデータを基準に
シミュレーションしつつこれを線画データDdに逐次変換する。併せて、この変換した線
画データDdに基づく線画情報をロボット10外部の線画表示装置21に表示させる。
(もっと読む)
工作機械の干渉検出装置及び干渉マップ
【課題】実際の工作機械で干渉が発生する前に干渉が発生することを予測可能とするために、より短い処理時間にて干渉判定を可能とする、工作機械の干渉検出装置を提供する。
【解決手段】可動体が移動する所定の空間内に複数のマップ点を設定し、各マップ点には可動体の基準点がマップ点と一致する位置となった場合に可動体が周囲の固定体と干渉するか否かを示す干渉情報が設定され、可動体毎の複数のマップ点が設定された干渉マップと、対応付けられた可動体を移動させる移動方向情報または移動位置情報または移動量情報の少なくとも1つを含む移動情報が記憶された移動情報記憶部48Bと、可動状態信号と移動情報とに基づいて可動体の基準点の移動先の位置である移動先位置を予測する可動体位置予測部46Cと、予測した移動先位置と干渉マップとに基づいて、可動体が移動先で固定体と干渉するか否かを判定する干渉マップ判定部46Dと、を有する。
(もっと読む)
負荷情報表示機能を備えた数値制御装置
【課題】負荷情報表示機能を備えた数値制御装置を提供すること。
【解決手段】実加工時の負荷情報を記録する手段を具備する数値制御装置において、実加工中の負荷情報を加工プログラムブロックに対応させて記憶する負荷情報記憶手段と、前記負荷情報記憶手段によって記憶された負荷情報と工具がワークを切削する様子を表示する加工シミュレーション表示部27とともに加工シミュレーション実行ブロック29に対応させて表示する手段とを有する負荷情報表示機能を備えた数値制御装置。
(もっと読む)
工作機械の干渉検出装置
【課題】実際の工作機械で干渉が発生する前に、仮想3次元モデルで干渉が発生することを検出可能とするために、より短い処理時間にて仮想3次元モデルにおける干渉判定を可能とする、工作機械の干渉検出装置を提供する。
【解決手段】干渉検出装置は、簡易形状置換部46Aにて、仮想3次元モデルにおける可動体と、当該可動体の周囲に位置する固定体と、の形状を、ポリゴンデータに基づいた詳細形状から、単純化した簡易形状に置換する。そして干渉可能性判定部46Eにて、簡易形状に置換された、可動体と固定体との距離、または可動体と別の可動体との距離が、干渉閾値未満である場合、干渉の可能性があると判定する。干渉の可能性があると判定されると、詳細干渉判定部46Fにて、ポリゴンデータに基づいた詳細形状に戻して干渉するか否かを判定する。
(もっと読む)
工作機械
【課題】実際の工作機械の加工工具の位置と一致するように、仮想3次元モデルの加工工具の位置を自動的に且つ高精度に調整することができる工作機械を提供する。
【解決手段】加工工具30を備えた工作機械1を制御する制御手段と、加工工具30の寸法を測定可能であるとともに、工作機械1上における加工工具30の位置を特定可能な工具測定手段と、工作機械1の動作に同期させて工作機械の仮想3次元モデルV1をシミュレート動作させることが可能なシミュレート手段と、仮想3次元モデルV1を表示する表示手段42とを備え、制御手段が工具測定手段を用いて加工工具30の寸法を測定して位置を特定した場合、測定した寸法に基づいて仮想3次元モデルV1中の加工工具の寸法を補正するとともに、特定した位置に基づいて仮想3次元モデルV1中の工作機械上における加工工具の位置を補正する。
(もっと読む)
ロボットのモーション編集装置及びそのプログラム
【課題】多関節型ロボットのモーションデータを編集する編集装置に関し、作成したモーションデータを再利用して、新たなモーションデータを作成する。
【解決手段】編集装置(3)は、操作ユニット(36)の操作に応じて、3次元擬似空間(60)でのロボットのモデルの各部位の位置、傾きを変更して、操作ユニット(36)のデータ作成指示に応じて、変更されたロボットのモデルの各部位の位置、傾きから、各関節の角度を計算し、キーフレームデータを作成し、3次元表示のための擬似空間内におけるロボットの状態データを付して、多関節型ロボット(1)に送信する。3次元擬似空間で作成されたデータを再利用して、他のモーションデータを3次元擬似空間で作成できる。
(もっと読む)
ロボットシミュレーション装置
【課題】ロボットを用いた様々な加工に対応可能であり、汎用性が高く、かつ精度が高いシミュレーションを実施することができるロボットシミュレーション装置を提供する。
【解決手段】エンドエフェクタ13を有するロボット12の3次元モデルと、ワーク14や周辺機器の3次元モデルとがディスプレイ3の画面上に所定の位置関係で配置された状態で、ワーク14や周辺機器に対して相対移動するエンドエフェクタ13の目標とされる移動先の所定位置を、画面上で2次元位置として指定する位置指定手段と、位置指定手段で指定された2次元位置のデータを3次元位置のデータに変換して移動先の3次元位置を取得する位置データ取得手段と、取得された3次元位置に対応するワーク14の形状データを取得する形状データ取得手段と、3次元位置及び形状データに基づいて、ロボット14の3次元位置及び3次元姿勢を算出する位置姿勢算出手段と、を備える。
(もっと読む)
1 - 14 / 14
[ Back to top ]