
Fターム[3D041AE06]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 推進装置 (2,853) | 気筒数 (7)
Fターム[3D041AE06]に分類される特許
1 - 7 / 7
車両の制御装置
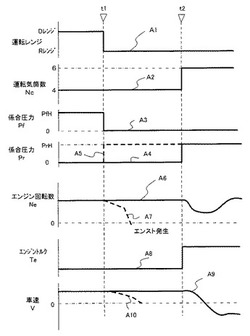
【課題】減筒運転した状態で前後進を切り替えた場合に、エンジンストールを確実に抑制することが可能な車両の制御装置を提供する。
【解決手段】車両の制御装置は、車両に搭載され、エンジンと、制御手段とを備える。エンジンは、複数の気筒を備える。制御手段は、気筒の少なくとも一部を休止させた減筒運転状態で、車両の前進と後進との切り替えに基づいて、エンジンと車両の駆動軸との動力伝達の係合圧力を低下させ、少なくとも一部の休止気筒の復帰を実行する。
(もっと読む)
車両の駆動力制御装置

【課題】車両の駆動力制御装置において、内燃機関において作動する気筒数が変化する際に生ずるショックの軽減を図る。
【解決手段】車両の駆動力制御装置は、複数の気筒(10)を有し、部分気筒運転と全気筒運転とを選択的に行う内燃機関(1)を内燃機関を備えた車両を制御する。気筒の各々について休止状態及び作動状態を切り替える気筒切り替え手段(100)と、回転速度比が可変である変速手段(2)と、車両の慣性力が気筒の数の変化に伴うトルク変化量を補償するように、前記回転速度比を制御する制御手段(100)とを備える。
(もっと読む)
車両用スリップ抑制制御装置
【課題】トラクション制御機能を備えた車両のドライバビリティを向上させる。
【解決手段】車両の前後の車輪の回転数の差に対応する値である監視値Mを検出するための検出手段と、前記検出手段により検出された監視値Mとしきい値との関係を判定するしきい値判定部46と、しきい値判定部46により監視値Mが第1スリップしきい値M1を超えていると判定されると、駆動輪の駆動力を減少させるトラクション制御を実行開始するトラクション制御部47と、を備え、しきい値判定部46は、監視値Mが第1スリップしきい値M1を超えてから第1スリップしきい値M1未満となるまでの戻り時間tをカウントし、トラクション制御部47は、戻り時間tに基づいてトラクション制御の終了判定を行う。
(もっと読む)
シリーズハイブリッド車両を作動させる方法
【課題】オペレータの出力要求に応じた方法においてシリーズハイブリッド車両を作動させる一方で、車両のドライバビリティにおいて、エンジン効率を最大化し、障害を最小化するのに好適な方法を提供すること。
【解決手段】シリーズハイブリッド車両の運転者が出力要求をする場合、第2の動力源(12)は、エネルギー貯蔵デバイス(14)に貯蔵された第2のエネルギー、エンジン(16)によって生成された直接入力のエネルギー、または両方、のいずれかが供給されるが、それは車両の第2の貯蔵デバイスのみに貯蔵された利用可能な第2のエネルギー量、および車両速度との組み合わせに依存する。エンジンが第2のエネルギーを生成するために使用される間、エンジンが作動する動力効率レベルはまた、車両速度、車両の第2の貯蔵デバイスのみに貯蔵された利用可能な第2のエネルギー量、および車両速度との組み合わせに依存する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両の乗員が走行挙動に違和感を与えることを防止しつつ燃費効率を向上させるハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド・マネジメントECU36は、車速VPをセット車速VCに追従させるクルーズコントロールの制御時のパラレル運転モードの状態で、パワープラント要求トルクの加算側の更新を規制し、ロックアップ上限トルクに係る所定トルク値に保持するようにし、車速VPが、セット車速VCから車速偏差の上限値ΔVSを減算して得た値未満に低下したとき、シリーズ運転モードに切り換える。
(もっと読む)
モータ化単線車両の駆動動的制御方法と駆動動的制御器
【課題】
前輪或いは後輪の浮上りのような臨界状況を確実に検出して制御するか、或いはカメラによってコーナリング中にブレーキをかけるモータ化単線車両の駆動動的制御方法と駆動動的制御器を提供すること。
【解決手段】
この発明は、車道に対する車両の傾斜角度(ρ)及び縦揺れ角度又はそのいずれか一方を考慮して記録されたカメラ画像シ−ケンスを評価するモータ化単線車両の駆動動的制御方法に関する。電気油圧式或いは電気機械式ブレーキ制御ユニットの制御閾値は、検知された傾斜角度(ρ)及びピッチ角度又はそのいずれか一方に依存して適合されている。
この発明は、電子制御部と駆動動的制御プログラム用メモリーを備える電気油圧式或いは電気機械式ブレーキ制御ユニットと、駆動動的制御器を備える画像シーケンス評価装置とから成り、この評価装置はさらに、標準ABS/TCS制御器(60)と、縦揺れ角度や縦揺れ速度を見積る第一ブロック(72)と、傾斜角度を見積る第二ブロック(73)と、制御閾値を算出する危機コンピュータ(80)とから成る。 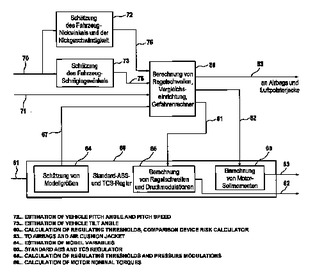 (もっと読む)
(もっと読む)
クルーズ制御装置
【課題】クルーズ制御に際し、実際の車速を目標速度により適切に追従させることのできるクルーズ制御装置を提供する。
【解決手段】ステップS14では、車両の加速度aに基づき、車両の走行方向に働く力を算出する。続くステップ16では、車速と目標速度との差と、車両に働く力とに基づき、車両を目標速度に保つために必要な駆動力を算出する。ステップS22では、算出される駆動力を、エンジンの出力と、ABSの制動力とに振り分け、ステップS24、S26では、振り分けられた出力や制動力を得られるような設定がなされる。
(もっと読む)
1 - 7 / 7
[ Back to top ]