
Fターム[3D114GA11]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 位置決め手段 (485) | 非接触によるもの (81)
Fターム[3D114GA11]の下位に属するFターム
センサ(光センサ等) (43)
画像処理 (34)
Fターム[3D114GA11]に分類される特許
1 - 4 / 4
搬送処理装置
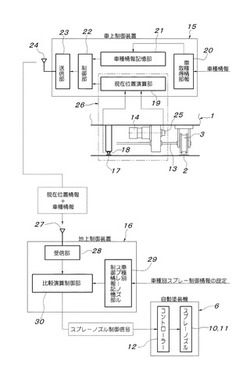
【課題】搬送台車上の定位置に積載されて搬送される複数種類の車体を自動塗装機によって自動塗装する塗装ラインなどに効果的に活用出来る搬送処理装置を提案する。
【解決手段】搬送台車1には、車種情報記憶部21と、搬送台車1の現在位置を判別する現在位置情報取得手段26と、車種情報と現在位置情報とを地上制御装置16に伝送する情報伝送手段が設けられ、地上制御装置16には、自動塗装機6を制御するときの搬送台車の現在位置が車体Bの種別毎に設定記憶される車種別スプレーノズル制御情報記憶部29と、自動塗装機6に制御信号を送信する比較演算制御部30が設けられ、この制御部30が、前記記憶部29の記憶情報と、自動塗装機6の位置を通過しようとする搬送台車1から受け取った種別情報及び現在位置情報とを照合して、前記記憶部29の記憶情報通りに、搬送台車1の現在位置に合わせて自動塗装機6を制御する構成。
(もっと読む)
ドア取り外し装置及び方法

【課題】ロボットの台数を削減して設備のレイアウト性を向上させることが可能な、ドア取り外し装置及び方法を提供すること。
【解決手段】双腕ロボット11は、自動車のボディにボルトで固定されたドアを、当該ボディから取り外すドア取り外し装置として機能する。双腕ロボット11は、ドアを把持する第1把持治具23R1を有する第1アーム22R1と、ボルト外し機構の一例のボルト緩めツール74とドア把持パッド72とを共に含む第2把持治具23R2を有する第2アーム22R2と、ドアの重力方向の荷重を受ける荷重受けとしてのドアH受け部材24と、を備える。
(もっと読む)
ドア把持装置及び方法
【課題】小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供すること。
【解決手段】双腕ロボット11は、ドア91等の重力方向の力を受ける荷重受けとしてのドアH受け部材(その構成要素であるウレタンパッド42)と、ドアを把持する第1把持治具23R1と、を備えている。第1把持治具23R1は、2点PA,PBの相対距離が可変な、ドア91の開口部120等に当接する2つのドア把持パッド53,54を有している。一方のドア把持パッド53は、ドアの荷重方向の力を受ける方向に開口部の点PAに当接し、他方のドア把持パッド54は、荷重受け(ウレタンパッド42)とドア把持パッド53とにより発生するモーメントを受ける方向に開口部の点PBに当接する。
(もっと読む)
自動車のフード状部とその他の自動車ボディとの間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置
本発明は、自動車の可動のフード状部(2)と該自動車の残りのボディ(3)との間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置(1)に関する。フード状部(2)はまず粗調整された組付け位置で前記ボディ(3)に対してできるだけ同一平面となるようはめ込まれかつ保持される。さらに前記フード状部は、隙間寸法および/またはオフセットについてのあらかじめ定義された値ができるだけ正確に守られるように微調整される。隙間寸法および/またはオフセットをできるだけ非接触で、できるだけ簡単かつ迅速に、かつ柔軟に調整することができるようするために、微調整のために、フード状部(2)と残りのボディ(3)との間の隙間寸法および/またはオフセットについての実測値(21_ist)が光学的に検知される。隙間寸法および/またはオフセットについての検知された実測値(21_ist)とあらかじめ設定された目標値(21_soll)に従って、少なくとも1つのアクチュエータ(12)のための制御信号(24)が求められる。  (もっと読む)
(もっと読む)
1 - 4 / 4
[ Back to top ]