
Fターム[3D114GA12]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | 位置決め手段 (485) | 非接触によるもの (81) | センサ(光センサ等) (43)
Fターム[3D114GA12]に分類される特許
1 - 20 / 43
加工システム及び加工方法
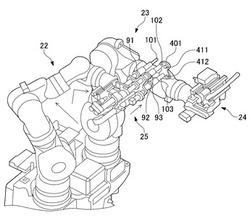
【課題】ツールの交換の際の通信時間及びロボットの移動時間を短縮すること。
【解決手段】締め付け機25が取り付けられたロボット22は、ツール101,102を取り付ける取り付け部91,92を有している。ロボット23の腕部には、交換用のツール411,412を収納する収納部材401が設けられている。ロボット制御装置は、ロボット22,23の各々の動作を制御することによって、ツール101,102が取り付け部91,92に取り付けられ、ツール411,412が収納部材401に収納されている第1の状態から、ツール101,102が収納部材401に収納され、ツール411,412が取り付け部91,92に取り付けられている第2の状態に遷移させる。
(もっと読む)
溶接組付方法

【課題】溶接を施すワークの種類が多岐にわたる製造ラインでの治具の切替を容易にし、低コストで短期間に設定変更ができる生産設備を提供する。
【解決手段】溶接組付ライン100には、台車106の経路107が設定されている。台車106には、治具110が着脱自在に載置される。識別部150は、治具110にセットされたワークの種類を特定する。台車106が進行した後、リフタ112は、ワークがセットされている治具110を持ち上げて保持する。溶接ロボット111は、リフタ112に保持された治具110上のワークに対して、識別部150によって特定されたワークの種類に応じた溶接を施す。溶接後、解放装置113は、ワークを治具110から解放する。マテリアルハンドリングロボット114は、この解放されたワークを取り出す。
(もっと読む)
車体生産装置
【課題】位置決めロボットが部品の搬送と部品の治具としての機能を発揮することで、車体である主要組製品を比較的容易に生産できる車体生産装置を提供することにある。
【解決手段】各溶組工程域Enで主要組製品WNを生産し、後段の溶組工程域Enに搬送することを繰り返すことで車体を製造する車体生産装置Aにおいて、溶組工程域Enには、溶組制御をする工程域制御手段30と、部品mをセット位置dに位置決めする位置決めロボット40と、部品mの溶接を行う溶接ロボット50と、部品mを支持する支持台とが配備され、工程域制御手段30は、位置決めロボット40により部品mを取り出しセット位置dへ位置決めし、溶接ロボット50により部品mの溶接を行って主要仮組製品Wnを生産し、次いで、待機位置s0に位置決めロボット40を待機させた後、溶接ロボット50にて主要仮組製品Wnの溶接箇所の増打を行い主要組製品WNが生産される。
(もっと読む)
ワーク取付け装置
【課題】ワークを車体に自動で取付けることができるワーク取付け装置を提供することを課題とする。
【解決手段】ワーク取付け装置10は、センサ180で検出した開口171の端部172とルーフガラス151の端部173との位置ずれ量、及びセンサ190で検出した開口171の端部181とルーフガラス151の端部182との位置ずれ量に基づき、制御手段200でルーフガラス151の位置及び姿勢を修正するために回転機構60及び移動機構110を制御する。
【効果】車体11の端部とルーフガラス151の端部との位置ずれが自動で解消された後、ルーフガラス151を車体11に取付ける。したがって、ルーフガラス151を車体11に自動で取付けることができるワーク取付け装置10を提供することができる。
(もっと読む)
ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付を完了できるハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ハンド14は、作業対象物2にワーク3を組付ける際に、オンハンド操作盤18が作業対象物からロボットの反対側に突出する長さを有している。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有しており、人6の判断や経験を必要とする作業時のみ協働モードに切替え、その他の作業を自動モードで実行する。
(もっと読む)
外部操作ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付作業を完了することができる外部操作ハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボットエリアと組立ラインの間に、ハンド14が移動可能な作業エリアとハンドが侵入できない安全エリアとが隣接して設けられ、オンハンド操作盤18は、作業対象物にワークを組付ける際に、作業エリア内に位置するように設定されている。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有している。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパが車両ボディ側と干渉する場合でも、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サスペンションアッセンブリ取り付け方法は、サスペンションアッセンブリ20を車両のボディ10に取り付ける方法であって、サスペンションアッセンブリを搭載した昇降可能なパレット3の上昇と同期させて、ダンパ25L,25Rを支持するダンパ支持ロボット5L,5Rによりダンパの位置を必要に応じて変更することで、ボディに対するダンパの干渉を回避する干渉回避工程と、サスペンションアッセンブリが所定の高さに到達したとき、ダンパ支持ロボットによりダンパをボディの所定のダンパ取付孔13L,13Rに位置合わせする位置合わせ工程と、を含む。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】インストルメントパネルの取付装置10は、ボディ14における対称位置で左右一対の車体側測定基準部120の車幅方向位置を計測する一対の第1変位計112と、車室内に搬入される前のインストルメントパネル24における対称位置で左右一対のインパネ側測定基準部122の車幅方向位置を計測する一対の第2変位計116と、第1変位計112及び第2変位計116によって得られる信号から、平面視のボディ中心位置C1及びインパネ中心位置C2を求める演算部134と、演算部134から供給される中心差ΔCに基づいてインストルメントパネル24の車幅方向位置を調整する調整手段85とを有する。
(もっと読む)
車体へのフードの位置決め方法
【課題】外観部品であるフードが、外観性に影響が出ないように位置決めされる位置決め方法を提供することを課題とする。
【解決手段】車体13側の第1左前点31と第1右前点32の中点42を算出し、また、第1左後点33と第1右後点34の中点43を算出し、車体中心線44を定める。フード12側の第2左前点36と第2右前点37の中点45を算出し、また、第2左後点38と第2右後点39の中点46を算出し、フード中心線47を定める。次に、車体中心線44にフード中心線47が合致するように、フード12を矢印のように移動する。
【効果】中心線同士を合わせるため、フードが車体に対してオフセットして位置決めされる心配はない。結果、外観部品であるフードが、外観性に影響が出ないように位置決めされる。
(もっと読む)
バンパビーム取付け装置及びバンパビーム取付け方法
【課題】ナットランナやロボットの稼働率を高めることができるバンパビーム取付け技術を提供することを課題とする。
【解決手段】バンパビーム取付け装置10は、車両製造ライン11上を直列に搬送されてきた2個の車体12、13を対象とし、前側の車体12にリヤバンパビーム14を取付け、後側の車体13にフロントバンパビーム15を取付ける装置である。
【効果】バンパビームを運搬するロボットと、ボルトの締付けを行うロボットとを、別々に設けたので、ボルトの締付け作業中に、バンパビームの運搬を行わせることができる。したがって、ナットランナ及びロボットの稼働率を高めることができる。
(もっと読む)
車体のドア閉まり検査装置及び検査方法
【課題】ドア閉まり検査装置を容易かつ正確に設置可能とし、かつその設置スペースを抑え、さらには車体の位置ズレに起因するドア閉止不良の発生を抑えると共に、ドアとドア閉まり検査装置との干渉時にもこれらの損傷を抑え、しかも実際のドア閉まり速度を正確に保証する。
【解決手段】枠体1Aに支持されて車体方向に押圧力を作用させる電動アクチュエータ23と、前記電動アクチュエータ23の作動タイミングを検出するレーザ距離センサ31と、ドアの閉止速度を検出するレーザ距離センサ52と、ドアの閉止状態を検出するレーザ変位センサ36とを備える。
(もっと読む)
自動車ルーフ組付装置
【課題】従来のルーフ組付装置では、4車種以上の多車種に対応できない問題点や、生産過程によるバラツキのためルーフ位置を微調整しなければならない課題があった。
【解決手段】自動車ボディにルーフをセットするルーフセットマテハンロボット2と、接合部溝幅計測用ガイド10及び接合部溝幅計測用センサー11を備えた複数のルーフ位置決めロボット1と、ルーフ位置決めロボット制御装置4と、スポット溶接ロボット3とを有し、複数のルーフ位置決めロボット1の各々の接合部溝幅計測用センサー11は、複数の接合部溝Mの幅溝を、それぞれの接合部溝幅計測用ガイド10との間で計測し、幅溝の測定値をルーフ位置決めロボット制御装置4に送信し、順次この方法を繰り返すことでルーフを適正な位置にセットしてからスポット溶接ロボットによってルーフとボディを溶接する自動車ルーフの組付装置による。
(もっと読む)
バッテリ搭載装置
【課題】 車両の傾斜に係らずバッテリを着脱可能なバッテリ搭載装置を提供すること。
【解決手段】 バッテリを載置して固定するバッテリ固定手段の傾斜状態を調整し、この調整された傾斜状態で車両の下面からバッテリを取り付けることとした。
(もっと読む)
蓋開閉システム、蓋開閉用治具および蓋開閉方法
【課題】対象物の本体部材に開閉可能に取り付けられる蓋部材を確実に開閉することが可能な蓋開閉システム、蓋開閉用治具、および蓋開閉方法を提供する。
【解決手段】自動車1のドア3を開閉するドア開閉システム100に、ドア3に固定される胴体部111、基準面136aが形成される位置決め板136、待機位置と解除位置との間で移動する解除部141、並びに治具側係合部151を備えるドア開閉用治具110と、フック172およびフック172の先端部から投受光する光学式センサ173を有するアーム側係合部171を備える操作アーム170と、基準面136aで反射されて光学式センサ173で受光される光により検出された相対位置に基づいてアーム側係合部171を解除部141に当接させてドア3の係止を解除するとともに治具側係合部151に係合した状態でアーム側係合部171を移動させてドア3を開く制御装置181と、を具備した。
(もっと読む)
動いているワークピースへの作業を実施するための方法及び装置
本発明は、コンベヤ(16)上で連続的に前へ進んでいるワークピース(12)の作業が、ワークピースと一緒に動く産業用ロボット(18)によって特定の作業区間を同期進行している間に実施される方法及び装置(10)に関する。この場合、産業用ロボット(18)は、コンベヤ(16)の隣に延びる独立した前後方向ガイド(48)に沿って移動可能であり、同期進行している間は産業用ロボット(18)のベース部分(20)が、ワークピースキャリア(14)に固定連結され、前後方向ガイド(48)内を進む車台に関して浮動状態で支持されている。この産業用ロボット(18)は交換可能なツールを有しており、同期進行開始時に、スキャンツールが産業用ロボット(18)の作業アーム(40)に接続され、ワークピースとワークピースキャリア(14)間の相対的位置が決定される。 (もっと読む)
ウィンドウガラスの取付装置及び取付方法
【課題】ウィンドウガラス取付手段をボディに同期して移動させつつ、ウィンドウガラスをボディの窓枠に取り付けるべく、制御することができる構成の自動車のウィンドウガラスの取付装置を提供する。
【解決手段】ボディを搬送する搬送手段3と、ウィンドウガラス16をボディ2に取り付けるアーム12を有するウィンドウガラス取付手段4と、ウィンドウガラス取付手段4の移動手段5と、移動手段5に設けられたセンサ6と、ボディの窓枠2bの段差部Bを、センサによって検出させ、その検出信号に基づいて、移動手段5によってウィンドウガラス取付手段4を搬送手段3と同期するように移動させ、センサ6によって、ウィンドウガラス16の端部を検出させ、ウィンドウガラス16の端部とボディ2の窓枠2bの段差部Bとが平面上で略一致するようにアーム12を制御する制御手段7と、を備えている。
(もっと読む)
搬送設備
【課題】本発明は、簡単な構成で、自走台車のエンジン位置をトロリ装置の車体のエンジン取付位置に自動同期させることができる搬送設備を提供することを目的とする。
【解決手段】トロリ装置3に設けた、進み検出用反射板58と遅れ検出用反射板60を、自走台車15に設けた光電スイッチ31,33により検出し、進み検出用反射板58のみが検出されると自走台車15を減速し、遅れ検出用反射板60のみが検出されると、自走台車15を加速する。この構成により、自走台車15をトロリ装置3に同期することができ、この際にトロリ装置3の走行速度を計測し、自走台車15に通信する必要がなく、また自走台車15からトロリ装置3に何ら通信する必要はなく、設備を簡略化することができる。
(もっと読む)
自動車などの組立て用搬送装置
【課題】車体にエンジンなどの組付け部品を車体下側から組み付ける部品組付け作業を行える搬送装置の大幅なコストダウンを図る。
【解決手段】車体Bを搬送する搬送台車1上に車体支持手段12が設けられ、この支持手段12で所定高さに支持された車体Bに対する下側からの部品組付け作業が搬送台車1上で行えるように構成された搬送装置において、搬送台車1の走行経路中のエンジン組付け作業区間の下側に、当該区間の始端位置6aから終端位置6bまで搬送台車1と同期して走行可能な同期走行台車22が設けられ、この同期走行台車22上に、搬送台車1の床面に設けられた開口部71を経由して昇降する昇降台55を備えたリフター31が搭載され、台車床面上に乗り入れて定停止位置で停止したエンジン搬入台車3のエンジンEを支持する昇降テーブル77が、同期走行台車22側のリフター31の昇降台55により所定高さまで持ち上げられる構成。
(もっと読む)
サスペンションアッセンブリ取り付け装置
【課題】設備にかかるコストを低減できるサスペンションアッセンブリ取り付け装置を提供すること。
【解決手段】マウントシステムは、複数機種に共通する締め付け箇所を締め付ける締付ロボットと、複数機種のそれぞれに固有の締め付け箇所を締め付ける固有箇所締付ユニット70Lと、を備え、締付ロボットは、アームと、このアームの先端に取り付けられたナットランナと、を備える。固有箇所締付ユニット70Lは、ナットランナ71と、ナットランナ71をサスペンションアッセンブリに対して進退させる進退機構72と、進退機構72を進退方向と交差する面に沿って移動可能に支持する移動機構73と、を備え、上述の締付ロボットは、この進退機構72を操作することにより、進退機構72を進退方向と交差する面に沿って移動させて、固有の締め付け箇所に固有箇所締付ユニット70Lのナットランナ71を対向させる。
(もっと読む)
ワークの形状認識システムおよびそれを具備する組立ライン、並びにワークの形状認識方法
【課題】搬送途中のワークの表面に現れる形状変化を精度良く認識し、組立ライン内に設けられる組付装置と、ワークとの間の位置ズレを防止することが可能な技術を提供することを課題とする。
【解決手段】車体3の搬送経路8に沿って設けられ、車体3の基準位置Zを検出するリミットスイッチ30と、同じく車体3の搬送経路8に沿って設けられ、車体3の基準位置Zからの移動量Lを検出するロータリエンコーダ40と、同じく車体3の搬送経路8に沿って設けられ、車体3の表面(主としてルーフ面3a、並びにその他の表面)との直線距離Hを検出するレーザ変位計50と、ロータリエンコーダ40とレーザ変位計50とにより検出された二つの検出値に基づいて、搬送方向と平行な方向における車体3の表面の形状変化を認識する認識装置60と、を具備する。
(もっと読む)
1 - 20 / 43
[ Back to top ]