
Fターム[3D232DA12]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角加速度 (87)
Fターム[3D232DA12]の下位に属するFターム
ハンドル操舵角加速度 (75)
タイヤ舵角加速度 (4)
Fターム[3D232DA12]に分類される特許
1 - 8 / 8
インホイールシステムを用いた車両制御方法
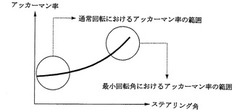
【課題】 車両の旋回安定性を確保しながらも、回転半径を最小化させることのできるインホイールシステムを用いた車両制御方法を提供する。
【解決手段】車両の各ホイールの内部にモータを装着して制御するインホイールシステムを用いた車両制御方法において、車両走行情報を基に車両の旋回モードを判断するステップと、旋回モードに対する車両の現在のアッカーマン率を計算するステップと、現在のアッカーマン率を基に制御命令を生成するステップと、制御命令を用いて各ホイールのモータをそれぞれ制御するステップと、を含むことを特徴とする。
(もっと読む)
車両のパワーステアリング制御装置

【課題】ドライバが、広い運転領域で操舵輪のグリップ状況を舵力インフォメーションとして舵力で感じとりながら安心して適切な運転を行う。
【解決手段】操舵制御部は、ハンドル角と車速に応じて車両の運動モデルに基づき目標横加速度Gytを算出し、実際の横加速度と目標横加速度Gytとの偏差(横加速度偏差)ΔGyを算出し、操舵速度の絶対値と車速とに応じて現在の操舵状態がドライバが舵力をフィードバックして操舵している状態か否か判定し、ドライバが舵力をフィードバックして操舵している状態と判定し、且つ、横加速度偏差ΔGyが予め設定しておいた設定値CG以上の場合は、車速と操舵トルクを基に設定する基本アシストトルクTbを増加する方向に補正して、この補正した基本アシストトルクTbをアシストトルクTaとしてモータ駆動部に出力する。
(もっと読む)
車両の操舵装置
【課題】 大幅なコストアップを招くことなく、操舵反力用モータ13を適切に駆動して所望の操舵反力が得られるようにする。
【解決手段】 転舵用モータ駆動回路38の入力部に昇圧回路50を設けて、転舵用モータ24に大電流を流すことができるようにする。昇圧回路50の出力により充電されるキャパシタ70を転舵用モータ駆動回路38と並列に設け、速い操舵操作が検出されたときに、切替スイッチ60を切り替えてキャパシタ70を操舵反力用モータ駆動回路37に接続する。これにより、キャパシタ70に蓄電しておいた電荷を操舵反力用モータ13の駆動電源として利用することができる。従って、速い操舵操作が行われた場合であっても、適切な操舵反力トルクを付与することができ、操舵反力用モータ駆動回路37の前段に昇圧回路を設けなくてすむ。
(もっと読む)
走行制御装置
【課題】自動操舵制御中における運転者による操舵入力のフィーリングを向上させることが可能な走行制御装置を提供する。
【解決手段】自動操舵電流演算部は目標操舵角に基づいて自動操舵電流を算出する。補助操舵電流演算手段は運転者が入力し操舵トルクに基づいて補助操舵電流を算出する。要求度判定手段は、目標進路からの運転者の離脱要求の度合いを、運転者によるステアリングホイールへの操舵入力に基づいて判定する。補助操舵電流の出力割合は要求度判定手段が判定した運転者の離脱要求の度合いの高低に応じて増減する。自動操舵電流の出力割合は補助操舵電流の出力割合の増減に応じて減増する。出力割合設定手段は運転者の離脱要求の度合いが最も高く、第1の出力割合を上限の割合に設定した状態で、運転者の離脱要求の度合いが低下したと要求度判定手段が判定した場合、第1の出力割合を当該上限の割合よりも低い割合に設定する。
(もっと読む)
車両のパワーステアリング装置
【課題】ステアリング操作をアシストするトルクを付与するに際してその目標とするトルクに対する外乱を適正に排除することにより、より安定した操舵フィーリングを実現することのできる車両のパワーステアリング装置を提供する。
【解決手段】このパワーステアリング装置では、車速v及び横加速度Ygに応じて目標トルクToを設定するとともに、操舵トルクTθが目標トルクToとなるようにアシストトルクTaを制御する。ここでは特に、車速v及び横加速度Ygに基づき操舵パラメータ(K,C,J,Tfmax)をマップ演算するとともに、操舵角θ及び操舵トルクTθの時系列的な関係からその時々の操舵フィーリングとして各対応する操舵パラメータ(Ke,Ce,Je,Tfmaxe)を推定する。そして、車速v及び横加速度Ygに基づき求めた操舵パラメータをこの推定した操舵パラメータにて補正して目標トルクToを求める。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】過電流及び異常過熱に対処する高価なハードウェアの構成部品のコストを抑えることができ、電流指令値の制限をSAT値に基づいて設定し、状況に応じた設定が可能な電流制御を実現する電動パワーステアリング装置の制御装置を提供する。
【解決手段】車両の操舵トルクに基づいて電流指令値を演算し、ハンドル操舵に補助力を付与するモータを電流指令値に基づいて制御する電動パワーステアリング装置の制御装置において、車両のSATを検出若しくは推定するSAT検出部と、SAT検出部で検出若しくは推定されたSAT値に基づいて電流指令値を制限する最大電流制限部とを設ける。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】良好なハンドル戻りを得ると共に、どのような車速状態においてもヨーレートを収束できるようにした高性能な電動パワーステアリング装置を提供する。
【解決手段】ステアリング機構に操舵補助力を付与するモータと、ステアリングシャフトに発生する操舵トルクと車速とに基づいてトルク指令値を演算するトルク指令値演算部と、トルク指令値に基づいてモータの電流指令値を演算する電流指令値演算部と、電流指令値に基づいてモータを駆動制御するようになっている電動パワーステアリング装置において、車両のヨーレートを検出若しくは推定するヨーレート検出部と、車速及び操舵角に基づいて目標ヨーレートを演算する目標ヨーレート演算部と、ヨーレート及び目標ヨーレートに基づいて補正量を演算して電流指令値を補正する補正部とを設ける。
(もっと読む)
運転支援装置
【課題】 必要以上のステアリングホイールの転舵操作が抑制されるよう運転支援する。
【解決手段】 ステアリングホイール10の把持部位13の形状を変化させる把持部位駆動装置21を有し、車両の現在の走行状態を示す車両状態情報を検出する車両状態情報検出装置31によって検出される車両状態情報に基づき、ステアリングホイール10の把持部位13を把持している運転者の掌に、所定の機械的刺激を与えるよう把持部位駆動装置21を制御することで実現する。
(もっと読む)
1 - 8 / 8
[ Back to top ]