
Fターム[3D232DE03]の内容
走行状態に応じる操向制御 (73,124) | 制御出力パターン (1,729) | 増減率変更 (125)
Fターム[3D232DE03]に分類される特許
1 - 20 / 125
ステアリング装置およびフォークリフト
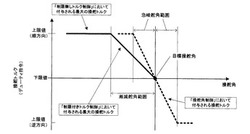
【課題】機械的な接触を行うことなく、実際の操舵角を目標操舵角で適切に維持できるようにする。
【解決手段】実際の操舵角(検出操舵角)が目標操舵角に到達するまでは、ステアリング51の操作トルクに応じて操舵輪に付与される操舵トルクが、漸減舵角範囲にわたって上限値から下限値にまで減少していく一方、目標操舵角に到達した以降は、逆方向の操舵トルクが、この漸減舵角範囲よりも狭い急峻舵角範囲にわたって下限値から上限値にまで増加していく。このように、操舵トルクが変化する操舵角範囲を、目標操舵角への到達以降において狭くすることで、操舵トルクの変化率が大きくなるため、その到達前に比べて操舵トルクが急峻に上限値まで増加していく。こうして、実際の操舵角が目標操舵角に到達した以降は、逆方向の操舵トルクが十分に大きくならない、というような操舵角範囲も当然狭くなる(漸減舵角範囲>急峻舵角範囲)。
(もっと読む)
操舵機構の制御装置

【課題】駆動モータ9の駆動指示量が全開に近い状態のときに、前進・後退を切換えるシフト操作を行うと、車両に慣性力が残っており、駆動輪5を駆動する駆動モータ9に多くの電力を要する。この状態にあるとき転舵モータ19の消費電力が大きいと、駆動輪5の駆動用の電力が不足するおそれがある。
【解決手段】駆動輪5を駆動する駆動モータ9の制御量を指示するアクセルペダル25の開度を検出し、前記アクセル開度が所定値以上であり、かつ、シフトレバー24の操作によって前進・後退切り換え信号の入力がある状態では、前記前進・後退切り換え信号の入力から所定の時間T以内において、前記転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定する。
【効果】シフト操作後の所定時間T以内において、転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定することにより、駆動輪の駆動用の電力の不足を解決する。
(もっと読む)
電動パワーステアリング装置
【課題】ヒステリシスを考慮して電動モータに供給する電流量を制御することで、操舵フィーリングの向上および安全性の向上を図ることができる技術を提供する。
【解決手段】ステアリングホイールの操舵トルクに応じた値を検出するトルク検出部210と、実際の操舵トルクとトルク検出部が検出する検出値との間のヒステリシスを考慮してトルク検出部210が検出した検出値を補正するトルク値補正部220と、トルク値補正部220が補正した検出値に基づいて電動モータ110に供給する目標電流を算出する目標電流算出部20と、を備え、トルク値補正部220は、トルク検出部210が検出した検出値に応じた補正量を用いて、操舵トルクが小さい場合にはヒステリシスを小さく、操舵トルクが大きい場合にはヒステリシスを大きくするように補正する。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置において、モータに電流を流す通電路に設けた開閉リレーが溶着等により閉故障した場合、安全に操舵アシストを継続して、運転者の感じる不便を軽減する。
【解決手段】リレー故障検出部61により開閉リレー48の閉故障が検出されると、制御態様変更部80は、目標電流演算部71、電流指令値演算部72、PWM制御部73に対して、回路故障抑制操舵アシスト制御の実行を指令する。回路故障抑制操舵アシスト制御時においては、モータ駆動回路40の故障が抑制されるように、モータ20の上限電流Imax、あるいは、上限電圧Vmax、あるいは、上限電力Pmax、あるいは、目標電流I*、あるいは、電圧指令値V*が低減される。
(もっと読む)
電動パワーステアリング装置
【課題】 電流センサ31が故障した場合でも、操舵アシストの追従性の低下を抑制して、良好な操舵アシストを継続させる。
【解決手段】 異常時制御量演算部80においては、基本電圧演算部81が目標電流I*に比例した基本電圧V0を計算する。また、回転角速度推定部82が操舵トルクセンサ21に設けられた回転角度センサ21bの回転角度θoutを微分してモータ回転角速度ωを推定し、補正電圧演算部83がモータ回転角速度ωに比例した補正電圧V1を計算する。電圧値加算部84は、基本電圧V0に補正電圧V1を加算して電圧指令値V*を計算する。
(もっと読む)
車両用舵角制御装置
【課題】旋回時、車体の向きと横加速度応答の適正化により、運転のしやすさを向上させること。
【解決手段】車両用舵角制御装置は、転舵角センサと、車輪速センサと、操舵角センサ5と、目標横加速度演算部15と、目標車体横滑り角演算部16と、転舵角演算部17と、前輪ステアリング機構と、後輪転舵機構と、を備える。目標横加速度演算部15は、車速と操舵角に基づいて目標横加速度を演算する。目標車体横滑り角演算部16は、車速と操舵角に基づいて目標車体横滑り角を演算する。転舵角演算部17は、目標横加速度と目標車体横滑り角を実現するように前輪舵角指令値と後輪舵角指令値を演算する。前輪ステアリング機構と後輪転舵機構は、舵角指令値に基づき、左右前輪と左右後輪の実舵角を独立に制御する。
(もっと読む)
車両用操舵装置
【課題】省エネルギに優れ、且つ耐久性を向上させることができる車両用操舵装置を提供する。
【解決手段】据え切り操舵や荷役同時操舵等の非省エネ操舵が行われると、認知手段としての警告灯が点灯され(ステップS5)、非省エネ操舵であること運転者に認知させる。目標操舵反力Th*の操舵角速度比例成分のゲインk2を2倍に増加し(ステップS6)、目標操舵反力Th*を増加補正する。操舵反力の増加により、運転者に非省エネ操舵をしていることを確実に気付かせる。反力制御部が、運転者に非省エネ操舵をしていることを認知させる認知手段として機能する。
(もっと読む)
操舵装置及びキックバック判定装置
【課題】適正にキックバックに対応することができる操舵装置及びキックバック判定装置を提供することを目的とする。
【解決手段】車両に設けられ回転操作することで操舵可能である操舵部材2と、前記操舵部材2の操舵角度と前記操舵部材2に作用する操舵トルクとに応じて定まる動作点が予め設定される判定領域外にある場合に、キックバック発生状態であると判定する判定装置8とを備えることを特徴とする。したがって、操舵装置、キックバック判定装置は、適正にキックバックに対応することができる。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、操舵補助力を利用して操舵輪を転舵し車両を目標軌跡に沿って走行させる。
【解決手段】操舵補助力発生装置14を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S200、300)、運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算し(S400)、操舵輪の舵角が目標舵角になるよう操舵補助力を制御する(S600)。特に操舵補助力の目標値は運転者の操舵負担を軽減するための操舵補助力と、操舵輪の舵角が目標舵角になるよう操舵輪を転舵するための操舵補助力との和に設定される(S600)。
(もっと読む)
電動パワーステアリング装置
【課題】転舵角に基づいて正確な操舵角を検出することができる電動パワーステアリング装置を提供する。
【解決手段】マイコン31は、左右の車輪速Wr,Wlに基づいて転舵輪に生じた転舵角θtを検出する転舵角推定部41と、転舵角θtを換算することによりステアリングに生じた操舵角θsを検出する操舵角換算部42とを備えた。そして、そして、操舵角換算部42は、ステアリングギア比Rに基づいて、転舵角θtを操舵角θsに換算するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】通電不良発生後の継続制御時における操舵フィーリングの向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】制御信号出力部は、二系統の独立したモータコイルに対応して設けられた各駆動回路に対して二系統の独立した制御信号を出力する。また、電力供給の基礎指令Iq*に基づき優先指令Iq*_x及び補完指令Iq*_yを演算することにより、一方の系統について通電不良の発生が検知された場合には、他方の系統に優先指令Iq*_xを振り分けることにより、当該他方の系統に対する制御信号出力を優先する。そして、通電不良の発生相が一相のみであり、且つ基礎指令Iq*の値が優先指令Iq*_xの上限値(Iq_max/2)を超える場合には、通電不良が発生した系統の駆動回路に対し、通電不良発生相以外の二相を通電相として、その上限値の超過分に相当する補完指令Iq*_yを基礎とした電力供給を実行すべく制御信号を出力する。
(もっと読む)
サーボ制御装置
【課題】サーボ制御における積分項を外乱の状況に応じて適正に設定し、オーバーシュートを低減しつつ外乱の影響を補償する。
【解決手段】曲率制御部42から出力される旋回のフィードフォワード制御の操舵トルクと、横位置制御部43から出力される車両の横位置制御の操舵トルクと、姿勢制御部44から出力される車両の鉛直軸回りの姿勢制御の操舵トルクと、積分制御部45から出力される横位置制御の偏差を補償する操舵トルクとを合算した目標操舵トルクを操舵系に与えて操舵支援を行う。その際、外乱変化に対する適切なタイミングで積分値をリセットし、また、外乱の大きさに応じた適切な積分量、積分範囲の制限等を行うことで、オーバーシュートを低減しつつ外乱の影響を補償する。
(もっと読む)
モータ制御装置
【課題】 演算負荷を高めずに精度良く誘起電圧を計算して電気角を推定する。
【解決手段】 簡易誘起電圧演算部111は、モータ20のインダクタンスLによる電圧成分(L・dI/dt)を含めない簡易誘起電圧e’を計算する。補正ゲイン設定部113は、補正ゲインマップを参照して、q軸指令電流Iq*が大きくなるほど小さくなる補正ゲインKLを設定する。誘起電圧補正部114は、簡易誘起電圧e’に補正ゲインKLを乗算して誘起電圧eを求める。これにより、微分演算処理を行わずに精度良く誘起電圧を計算することができる。
(もっと読む)
狭路走行支援装置、狭路走行支援方法
【課題】狭路を走行する際に、運転者に対して適切なステアリング操作を直感的に促す。
【解決手段】ソナー11L及び11Rによって、走路境界との距離yL及びyRを検出し、検出結果に応じて狭路支援制御の介入が必要か否かを判断する(S103)。制御介入が必要であると判断したら、最終トルク指令値Ifに対して制御介入し、操舵支援を行う(S105)。ここでは、回避トルク指令値Iaと助勢トルク指令値Isとの加算によって最終トルク指令値Ifを演算する(S205)。回避トルク指令値Iaは、走路境界から離れる方向の支援トルクとなる。一方、助勢トルク指令値Isは、運転者の操舵方向と同一の支援トルクとなるので、運転者の操舵方向が走路境界に向かっていれば、この助勢トルク指令値Isを減少補正することで、走路境界に対する接近が抑制される。
(もっと読む)
車両用操舵装置
【課題】操舵に対して応答性よく転舵輪を転舵しつつも、操舵開始時や操舵停止時に大きな操舵反力の変化が発生することを抑制してドライバに与える違和感の低減を図る。
【解決手段】転舵制御部25は、第1の目標転舵角θ1と第2の目標転舵角θ2とを加算した最終目標転舵角θtに基づいて転舵モータ7を制御している。一方、反力制御部26は、第1の目標操舵反力T1と第2の目標操舵反力T2とを加算した最終目標操舵反力Ttに基づいて反力モータ3を制御している。この場合、第2の目標操舵反力T2を演算する第2の目標操舵反力演算部24は、操舵角速度θtに基づく第2の目標転舵角θ2の変化を抑制した値(第2の転舵角補正値)に基づいて第2の目標操舵反力T2を算出する。
(もっと読む)
車両用操舵装置
【課題】転舵輪の最大舵角近傍に達したステアリング操作を抑制することが可能な車両用操舵装置を提供すること。
【解決手段】マイコン41は、転舵角が転舵輪の最大舵角近傍の所定の舵角を超えた場合には、車速が速いほど、又は転舵角が大きいほど、伝達比可変装置8のモータ13を制御するための位置比例ゲインを高くするとともに、転舵角が転舵輪の最大舵角近傍の所定の舵角を超えた場合には、転舵角が大きいほど、伝達比可変装置8のモータ13を制御するための微分ゲインを高くする。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】曲げモーメントの検出のために別途センサを設けることなく、磁歪式トルクセンサのみでステアリングシャフトに作用する曲げ荷重を検出する。
【解決手段】ステアリングシャフト7に捻りトルクのみをかけたときの第1検出コイル及び第2検出コイルの検出値の特性曲線を、初期検出値からなる初期特性曲線として記憶部31に記憶し、ECU3内の曲げ荷重検出部32において、第1検出コイル及び第2検出コイルの検出値とこの検出値に対応する前記初期特性曲線における初期検出値との差分に基づき、ステアリングシャフト7に作用する曲げ荷重量を検出する。
(もっと読む)
電動パワーステアリング装置
【課題】 モータが脱調したときに発生する振動により運転者に与える違和感を低減する。
【解決手段】 アシストトルク設定部は、回転角センサの異常が検出されていないときに使用する正常時アシストマップと、回転角センサの異常が検出されていないときに使用する異常時アシストマップを記憶する。異常時アシストマップは、正常時アシストマップに比べて、不感帯X1が広く、低トルク域X3Lにおいて目標アシストトルクT*が小さく、高トルク域X3Hにおいて目標アシストトルクT*が大きく、上限制限開始トルクTr2が小さく設定される。これにより、モータが脱調したときには、モータ電流が急増するため、電流ベクトルが逆アシスト領域に入っている期間が短くなり、操舵ハンドルに現れる振動が低減される。
(もっと読む)
電動パワーステアリング
【課題】ステアリング機構の操舵力を電動モータでアシストするアシスト制御を行うシステムにおいて、路面状態に応じた適正なアシスト制御を行うことができるようにする。
【解決手段】車両が走行する路面状態(例えば、舗装路、雪道、草原、岩場等)に応じて運転者が路面モード選択スイッチ17を操作することで、車両が走行する路面状態に対応した路面モード(例えば、舗装路モード、雪道モード、草原モード、岩場モード等)を選択する。そして、路面モード選択スイッチ17で選択された路面モードに応じてアシスト制御の制御特性(例えば、車速と操舵トルクとアシストトルクとの関係)を変更することで、車両が走行する路面状態に応じた適正なアシスト制御を行う。その際、路面モード選択スイッチ17で路面モードが切り替えられた場合に、ステアリング機構の操舵角が中立位置でないときには、アシスト制御の制御特性の変更を禁止する。
(もっと読む)
電動パワーステアリング装置
【課題】イナーシャ補償信号、ダンパ補償信号、および、ベース信号相互間の影響を低減する。
【解決手段】少なくとも操舵トルクに応じて、ベース信号(DT)を演算するベース信号演算部220と、電動機の回転速度もしくは操舵速度に応じて、ダンパ補償信号を演算するダンパ補償信号演算部225と、ダンパ補償信号およびイナーシャ補償信号がベース信号を補償して定められた目標信号によって電動機が駆動され、操舵補助力を付与する電動パワーステアリング装置において、少なくとも操舵トルクに基づいてイナーシャ補償信号を演算するイナーシャ補償信号演算部215を備え、このイナーシャ補償信号演算部の特性は、微分手段の特性と信号安定性向上手段の特性とに分割され、ベース信号をダンパ補償信号で補償した補償信号と微分手段とを加算する加算器250が備えられ、信号安定性向上手段は、加算器の出力側に配置される。
(もっと読む)
1 - 20 / 125
[ Back to top ]