
Fターム[3D232GG08]の内容
走行状態に応じる操向制御 (73,124) | 車種 (3,640) | 産業用車両 (110) | 多方向走行車両 (9)
Fターム[3D232GG08]に分類される特許
1 - 9 / 9
自動車
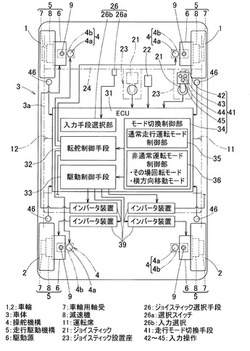
【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
編成搬送台車設備

【課題】複数の台車により運搬物を運搬する編成搬送の途中で、ステアリング伝送手段にトラブルが発生しても、編成搬送を継続できる。
【解決手段】マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードと走行モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から求めた編成旋回中心から、各車輪装置の編成スレイブ軸目標舵角をそれぞれ演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、スレイブ台車(SC)に、ステアリング伝送手段(41A,42,43A)の故障時に、マスタ台車(MC)の操舵装置(M3)と同一角度で操作されるステアリング操舵角と、編成データ出力部(52)の編成データとにより、マスタ台車(MC)の編成旋回中心と同一位置となる従動編成旋回中心を求めて各車輪装置を操舵する操舵コントローラ(S20A)を設けた。
(もっと読む)
編成搬送台車設備
【課題】複数の独立換向式の車輪装置を有する複数の台車を使用して、大型の運搬物を運搬する。
【解決手段】複数台のうち1台をマスタ台車(MC)とし、残りをスレイブ台車(SC)とし、マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から台車群の編成旋回中心を求め、この編成旋回中心から各車輪装置の編成スレイブ軸目標舵角を演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)とを設け、スレイブ台車(SC)に車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、マスタ台車(MC)からスレイブ台車(SC)の舵角指令部(M20B)に編成目標舵角を送信する伝送ケーブル(43A)を設けた。
(もっと読む)
コンテナクレーンの走行制御装置
【課題】駆動輪に取り付けられた走行モータの回転数を個別に制御して、直進走行させる際の駆動輪間の速度差を小さくすることができ、コンテナクレーンを運転するオペレータの乗り心地を向上させることができるコンテナクレーンの走行制御装置を提供すること。
【解決手段】タイヤ式走行装置11eにより、コンテナヤードに並列にして設けられた複数の帯状のコンテナ設置スペースに沿って走行するコンテナクレーン3の走行制御装置13であって、前記コンテナヤードの設計段階における設計値、あるいは竣工時に実際に計測した計測値に基づいて作成されたコンテナ設置スペース毎の傾斜方向、傾斜量、および傾斜量に対応した前記タイヤ式走行装置11eの旋回角をデータベースとして備え、走行しようとするコンテナ設置スペースが変わる度に、前記タイヤ式走行装置11eの旋回角を設定し直すように構成されている。
(もっと読む)
動力車
【課題】操作者の操縦操作に応じて推進及び操舵を行うものにおける障害物との衝突を停止することなく回避する。
【解決手段】人が操作指示を行うための操作入力部4と該操作入力部に加えられた操作指示を検出する指示検出部Cと、加えられた指示に応じて操舵や推進のための動力を制御する制御手段CPUと、障害物を検出する障害物検知センサー5とを備える。また、障害物検知センサーによる障害物の検知出力に基づいて旋回動作中に車両に対して横移動の力を付加する衝突回避手段を備えている。停止することなく障害物を回避することができる。
(もっと読む)
自走台車のステアリング制御装置、自走台車、およびステアリング制御方法
【課題】自走台車の全のタイヤのステアリング軸の遅れ角をほぼ同一にし、タイヤに負担がかかることを防止し、タイヤの摩耗を減少させる。
【解決手段】全てタイヤ100のステア角を、タイヤ角度検出器31により常時検出し、比較器15により、個々のタイヤごとにステア指令角信号Vsとステア角FDBK信号とを比較し、ステア偏差角を求める。そして、最大偏差角演算回路18により、個々のタイヤのステア偏差角の内から最大偏差角を求める。ステア偏差角補正回路19では、最大偏差角の情報を基に、個々のタイヤ100のステア偏差角に補正を加え、この補正されたステア偏差角を基に、個々のタイヤ100の油圧機構に流れる油量を制御して、各タイヤのステア角を制御する。これにより追従が特に悪い軸(ステアリング遅れ角が大きい軸)に積極的に油を流すようにし、ステアリング遅れ角をほぼ同一にする。
(もっと読む)
車両の操作装置
【課題】複数輪を独立して操舵可能な車両において、4輪を独立して操舵する独立操舵走行の操作を容易にする。
【解決手段】モード選択スイッチ21が配置されたケーシング20、ステージ30、ステージ30上に配設されステージ30に対して回転及び固定可能に配設される操作部40を備える。操作部40の上面には、液晶表示装置からなる表示部42が配設され、この表示部42には、車両図43が表示される。表示部42の上面には、タッチパネルが配設される。信地回転の場合、操作部40で回転中心を指定し、指定した回転中心を中心として回転可能に構成される。平行移動の操作の場合、水平面上の前後、左右、斜めの方向に移動可能に構成される。操作部40の動きを、平行移動、信地回転といった独立操舵固有の動きと一致させているので、操作者は、車両の動きをイメージしながら操作することが可能になる。
(もっと読む)
車両及び車両用操作装置
【課題】他車両に取って予想外の動きをする機会をより少なくする。
【解決手段】予め決められた条件を満たす場合に、独立操舵走行が可能な構成とする。予め決められた条件としては、所定車速v5(例えば、10km/h)以下であって、車両の現在位置が許可領域内であることである。ここで、許可領域とは、駐車場内、周囲に駐車スペースがある場所、路上に設けられたパーキングメータのある駐車スペース、又は自宅等の駐車エリアで指定済みの場所である。なお、車速の条件は省略可能であり、駐車場等の所定場所にいる場合に条件を満たすこととしてもよい。
(もっと読む)
車両及び車両用操作装置
【課題】4輪独立操舵車両における、回転中心の指定と旋回操作を容易にする。
【解決手段】 回転位置と回転方向の指定、及び平行移動の方向の指定を同一のコントローラで行う。コントローラでは、指定可能な回転位置として、各駆動輪の位置4カ所、隣接する駆動輪間の中心位置4カ所、及び、車両領域の重心位置1カ所、の合計9カ所のうちのいずれか1カ所が指定可能に構成される。コントローラは、操作部が重心位置を除く8方向に傾斜可能に構成され、いずれかの方向に傾斜した状態で操作部を押下することで選択する。中心位置を選択した後に操作部を右、又は左方向に回すことで、回転方向を選択する。車両制御部では、回転中心が選択されると、回転中心位置にない各駆動輪について、各駆動輪を選択された回転中心の方向と略直角方向に操舵し、指定された回転方向に駆動輪を駆動することで、指定された回転中心を中心にした信地回転が行われる。
(もっと読む)
1 - 9 / 9
[ Back to top ]