
Fターム[3D244AA38]の内容
定速走行制御 (7,912) | 目的 (1,793) | 危険回避、安全性向上 (673) | 誤操作対策 (14)
Fターム[3D244AA38]に分類される特許
1 - 14 / 14
車両用走行制御装置
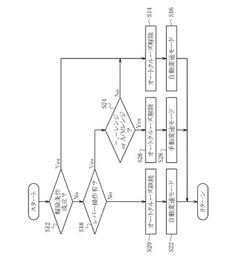
【課題】自動変速モードを選択したオートクルーズ制御中に手動変速モードへの切換が指令されたときに、それに応じて変速制御モードの切換とオートクルーズ制御の作動状態とを適切に連係でき、もって運転者の意志を反映した適切な車両の走行を実現できる車両用走行制御装置を提供する。
【解決手段】オートクルーズ制御中に手動変速レンジ(A/Mレンジ、+−レンジ)への切換操作がなされたとき(S24がYes)、運転者の加減速要求であると見なし、オートクルーズを解除して手動変速モードを選択することで任意の手動変速を可能とし(S26,28)、一方、オートクルーズ制御中にNレンジへの切換操作がなされたときには誤操作と見なし(S24がNo)、オートクルーズを解除して自動変速モードを選択し不適切な変速を防止する(S14,16)。
(もっと読む)
油圧無段変速機付き自走式車両

【課題】所望の位置でアクセルを保持することのできるクルーズコントロール機構を備える油圧無段変速機付き自走式車両を提供する。
【解決手段】HST(油圧無段変速機)1と、回動させることによってHST1の変速操作をする前進アクセルペダル(変速操作部材)28と、前進アクセルペダル28の回動位置を保持するクルーズコントロール機構30とを有するHST付きトラクタ(自走式車両)21において、クルーズコントロール機構30が摩擦部材30hを備え、摩擦部材30hによって前進アクセルペダル28の回動位置を保持する。
(もっと読む)
アクセルペダル反力制御装置
【課題】電気的に制御されるアクチュエータによる消費電力を抑制することが可能なアクセルペダル反力制御装置を提供する。
【解決手段】アクセルペダル反力制御装置12は、電気的に制御されるアクチュエータ28によりアクセルペダル14に反力Frを付与する。アクセルペダル反力制御装置12は、車両10が定速走行しているとき、反力Frを減少させる。
(もっと読む)
車両の走行制御装置
【課題】クルーズコントローラの設定スイッチの誤操作を抑制できるとともに、該設定スイッチの操作性を向上させる。
【解決手段】車両の走行速度を目標速度に維持するように該車両を加減速制御するクルーズ走行制御を行うACCコントローラ37を備えている車両の走行制御装置である。車両のドライバにより操作されるシフトレバー3と、少なくともP、R、N、Dの各ポジション7,9,11,13が設定され、該シフトレバー3を該各ポジション7,9,11,13に案内するためのシフトゲート5とを有している、車両の自動変速機53を操作するためのシフトレバーユニット1をさらに備えている。シフトレバーユニット1には、上記目標速度を設定するためのセットスイッチ3,45が設けられている。
(もっと読む)
車両制御装置
【課題】アクセル操作とブレーキ操作を1つのペダルで兼用する車両制御装置において、従来よりも車速制御をしやすくすること。
【解決手段】ペダル40の踏み込み量によって車速を制御する速度制御部100を設ける。この速度制御部100は、ペダル40が速度制御踏み込み範囲内で踏み込まれたときは車速を減速させ、速度制御踏み込み範囲内でペダル40が戻されたときは車速を加速させる。また、ペダル40が速度制御踏み込み範囲よりも深い制動範囲まで踏み込まれたときは、その踏み込み量に応じた制動力で車両を制動させる。ペダル40の踏み込み量の大小によって車速を制御することができるので、速度制御がしやすくなる。しかも、速度制御踏み込み範囲を超えてさらに深い範囲まで十分に踏み込むことにより急ブレーキをかけることも可能となる。
(もっと読む)
車両の走行制御装置
【課題】 停止中の車両がドライバの意図することなく走行することを防止することができる車両の走行制御装置を提供する。
【解決手段】 車間制御ECU2は、車間制御部21および制御解除部22を備えている、車間制御部21は、先行車両との車間距離や車両の車速に基づいて、先行車両を追従する先行車両追従制御を行う。制御解除部22は、車両の走行中にドライバがブレーキ操作を行った場合に車間制御部21の制御を解除する。また、車両の停止中にドライバがブレーキ操作を行った場合に、車間制御部21による車間制御の制御解除を中止する。
(もっと読む)
車両の走行制御装置
【課題】車両の実走行速度を目標速度に一致させるように実走行速度調節手段を制御する制御手段を備えた車両の走行制御装置において、目標速度変更スイッチにより目標速度の変更を行う場合に、目標速度がいくらに変更されたかを車両の乗員が把握し易くする。
【解決手段】乗員によるセットスイッチの操作後における目標速度変更スイッチの2回目以降の操作時には、目標速度を、目標速度変更スイッチの1回の操作毎に一定の速度だけアップ又はダウンさせる(ステップS8)一方、上記セットスイッチの操作後における目標速度変更スイッチの1回目の操作時には、目標速度を一定の速度以下の速度だけアップ又はダウンさせる(ステップS4)。
(もっと読む)
車両走行制御装置
【課題】 定速走行制御中において適切に変速を実行してドライバーの運転操作の煩雑化を防止する車両走行制御装置。
【解決手段】 定速走行制御時にエンジンブレーキが機能する状況になった場合、この時のエンジンブレーキ力が、調停部18が選択する定速走行制御側要求制駆動力Fctを満足できなければ、ドライバーは制動操作を行うことになる。AIシフト制御部20は、最大エンジンブレーキ力が選択制駆動力Fstのレベルに達していなければ、シフトダウンによりエンジンブレーキ力を強めて制駆動力を維持させることができる。このため目標車速Vctを維持してドライバーによるブレーキ操作等の煩雑化を防止することができる。又、カーブにおいて定速走行制御の目標車速を制限することによりドライバー操作の煩雑化と制御ハンチングを防止できる。
(もっと読む)
先行車追従走行制御装置
【課題】 先行車追従走行制御における停止保持制御状態から制御解除状態への切り換え操作を改善する。
【解決手段】 車両の走行駆動源による駆動力と通常ブレーキ装置による制動力とを制御して、先行車との車間距離を保ちながら追従走行制御を行う追従走行制御装置において、追従走行制御中に停車状態が検出され、駐車ブレーキ装置を制御して作動させている状態(停止保持制御状態)において、追従走行制御を解除するための解除操作部材に対して追従走行制御を解除する操作と異なる所定の操作が行われた場合には、追従走行制御を解除して駐車ブレーキ装置を非作動とした状態(制御解除状態)へ切り換える。
(もっと読む)
車両の走行補助装置
【課題】 運転者におけるハンドル把持の程度に応じてACCシステムによる加速制御を規制することにより運転者における違和感の発生を抑制して円滑なオートクルーズ制御を実行し得る車両の走行補助装置を提供する。
【解決手段】 車両を加減速させることにより、自車両を予め設定された目標車速となるように走行させる定速制御、および自車両の前方に存在する先行車両との車間距離を予め設定された目標車間距離となるように走行させる追従制御の少なくともいずれか一方の制御を行うオートクルーズ制御手段と、運転者が適正な保持力でハンドルを把持していないことを検出する不適正把持検出手段と、上記オートクルーズ制御手段による制御中に、この不適正把持検出手段からの検出結果に基づいて運転者が適正にハンドルを把持していないことを検出した場合に、上記オートクルーズ制御手段による加速制御を規制する自動加速規制手段とを備える。
(もっと読む)
車両用入力装置
【課題】 運転者の意図する操作内容とは異なる操作が行われても、運転者に違和感を与えることがない車両用入力装置を提供する。
【解決手段】 ステアリングホイール101の操舵の有無を舵角センサ19で検出し、舵角センサ19で検出されたステアリングホイール101の操舵角Sが所定の角度範囲の場合に、先行車追従制御システムに関する操作スイッチであるコントロールスイッチ16の操作を無効とするように構成した。これにより、ステアリングホイール101の回動位相に起因するコントロールスイッチ16の誤操作があっても、先行車追従制御システムの動作には影響がないので、運転者の意図しない内容の先行車追従制御により運転者が違和感を覚えることがない。
(もっと読む)
車両の制御装置
【課題】 操作性を悪化させることなく、乗員が望む停止位置で車両を停止させる。
【解決手段】 ECT_ECUは、アクセル開度Pを検出するステップ(S124)と、アクセル開度Pの変化量ΔPを検出するステップ(S126)と、アクセル開度Pの変化量ΔPに基づいて目標移動距離LIを算出するステップ(S128)と、算出された目標移動距離LIの総和である総移動距離LAを算出するステップ(S130)と、車両の実走距離が総移動距離LAとなるように車両を制御するステップ(S132)と、アクセル開度変化率DPが0であるという条件、アクセル開度変化率DPがDP(0)(DP(0)≒0)より小さいという条件およびブレーキペダルが踏まれたという条件の少なくともいずれかが満たされた場合(S136にてYES)、車両の移動を停止するステップ(S138)とを含む、プログラムを実行する。
(もっと読む)
車両用制御対象判定装置
【課題】 自車の将来の走行軌跡の信頼性が低下したときでも制御対象の誤判定の発生を防止する。
【解決手段】 レーダー装置14が自車の進行方向に存在する物体を検知した結果と、走行軌跡推定手段M1が車速およびヨーレートから推定した自車の将来の走行軌跡と、予め定められた制御対象判定条件とに基づいて制御対象判定手段M4が制御対象を判定する際に、横相対速度検出手段M3で自車に対する物体の横相対速度を検出し、推定した走行軌跡が直線状態でなく、かつ物体の横相対速度が閾値未満の場合、あるいは推定した走行軌跡が直線状態であり、かつ物体の横相対速度が閾値以上の場合に、自車から所定距離以遠の物体を制御対象から除外することで、隣車線の先行車を制御対象と誤認するのを回避することができる。
(もっと読む)
コンバイン
【課題】走行機体の無段階変速を円滑に行い、操作性を向上させる。
【解決手段】エンジンからの動力を、前進・後退の出力に切り換え可能な走行用油圧式動力伝達機構から左右一対の遊星歯車機構を介して左右一対の走行クローラの駆動輪へ伝達するように構成する一方、操向用の丸ハンドル47の左右旋回のための操作量に応じて出力調節可能な旋回用油圧式駆動手段を介して旋回に必要な差動トルクを左右一対の遊星歯車機構に付与する。走行速度は変速用ペダル101の踏込みと、オートクルーズセットスイッチ129のONで決定きるように構成する一方、オートクルーズ解除スイッチ130のON状態では変速用ペダル101の踏込み量に比例して、走行速度を増速・減速させることができるように制御装置103が制御する。
(もっと読む)
1 - 14 / 14
[ Back to top ]