
Fターム[3D244AE25]の内容
Fターム[3D244AE25]に分類される特許
1 - 9 / 9
他車認識システム
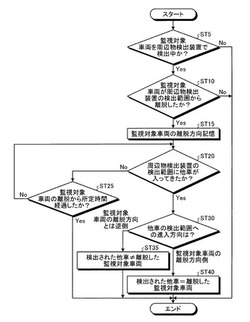
【課題】周辺物検出装置で見失った監視対象車両と新たな検出車両との同一性判断。
【解決手段】自車の周辺の他車情報を受信する通信装置30と、自車の周辺の他車を検出する周辺物検出装置20と、を備え、前記他車情報の発信車両が前記周辺物検出装置20の検出範囲から離脱した際の離脱方向と、前記発信車両が前記検出範囲から離脱した後で車両が前記検出範囲に進入した際の進入方向と、に基づいて、前記検出範囲に進入した車両が前記発信車両と同一の車両か判断すること。その際、前記進入方向と前記離脱方向とが異なる場合に、前記検出範囲に進入した車両を前記発信車両とは異なる車両と判断する。
(もっと読む)
内燃機関の電子制御装置及び速度制御方法

【課題】スロットルバルブの開度の変更及びバルブの駆動位相の変更等に起因する速度の変動を低減して、目標速度を安定して維持することのできる内燃機関の速度制御装置を提供する。
【解決手段】スロットルバルブ駆動機構37によるスロットルバルブ36の開度を制御するスロットルバルブ制御部8Aと、可変バルブタイミング機構6によるバルブの駆動位相を制御するバルブ位相制御部8Bとを備えた内燃機関の電子制御装置8であって、前記バルブ位相制御部8Bに、前記スロットルバルブ制御部8Aによる前記スロットルバルブ36の制御開度が一定の下で目標速度を維持するように、前記バルブの駆動位相を制御する定速制御部8Cを備えている。
(もっと読む)
車両走行制御装置
【課題】運転者による制動操作の解除後に、車両が急加速することを抑制することができる車両走行制御装置を提供すること。
【解決手段】運転者の制動操作に基づいて油圧による制動トルクを発生するブレーキ装置を有する車両の車速を予め設定された目標車速となるように、エンジンが発生する駆動トルクを制御することで自動走行制御を行う車両走行制御装置において、エンジンは、運転者の加速操作に基づいても駆動トルクを発生するものであり、自動走行制御は、運転者による制動操作の解除に基づいて、運転者による加速操作に拘わらず行われる。運転者による制動操作が解除された場合(ステップST4)、運転者による制動操作の解除から所定時間T(ステップST6)は、エンジンが発生する駆動トルクを車速Vを目標車速Voとすることができる駆動トルクよりも小さく制限されるように、今回の目標駆動トルクETo(n)を算出する(ステップST7,ST8)。
(もっと読む)
車両自動走行制御装置
【課題】実加速度が目標加速度に対して良好に追従しながら、車両を自動走行させることができる車両自動走行制御装置の提供。
【解決手段】フィードフォワード演算値及びフィードバック演算値の各演算値から目標要求トルクを求める目標要求トルク演算手段31と、その求めた目標要求トルクに基づいて車両を自動走行させるとともに、車両の何れかの車輪がスリップしたときに車輪のスリップを抑制するスリップ抑制制御を実行する自動走行制御手段Dとを備え、目標要求トルク演算手段31は、自動走行制御手段Dによってスリップ抑制制御が実行された場合、目標加速度と実加速度との偏差に基づくフィードバック演算値を保持し、その保持したフィードバック演算値及びフィードフォワード演算値の各演算値から目標要求トルクを求める。
(もっと読む)
車両の運転支援装置
【課題】制御の不自然な自動解除を防止して実用性の高い走行制御を実現する。
【解決手段】走行制御ユニット5は、追従走行制御時に先行車をロストした場合に、定速走行制御へと直ちに移行させるのではなく、保持時間Tの経過を待って移行させる。その際、ロスト時車速Vlostが低速領域にあるときの保持時間T(=T2)を高速領域にあるときの保持時間T(=T1)よりも相対的に長い時間に設定する。これにより、渋滞や狭路走行等が予測される低速追従走行制御時に先行車をロストした場合には、自車両1がセット車速Vsetまで加速することをドライバに認識させるのに必要十分な時間の経過を待って定速走行制御に移行することができ、追従走行制御を低速領域にまで拡張したACC制御において、低速追従走行制御中に先行車をロストした場合にも、ACC制御を自動解除することなく、定速走行制御への移行を好適に実現することができる。
(もっと読む)
車両の制御装置
【課題】 駆動力及び制動力を使用した定速走行制御が加速操作に依らずに終了しても、例えば、登坂中の車両が加速せず、運転者に違和感を与えることを回避することができる車両の制御装置を提供すること。
【解決手段】 電子制御装置50は、制御スイッチ46Aが操作されること等により加速操作及び制動操作に依らずに定速走行制御を終了する時点(特定制御終了時点)以降にて、車両駆動力を特定制御終了時点の加速操作量に応じた力(0)へ減少させる。一方、電子制御装置は、駆動力と同方向ならば正の(反対方向ならば負の)値をとる力であり駆動力の大きさから制動力の大きさを減じた値を大きさとして有する車両推進力の値が特定制御終了時点の車両推進力の値以下となるように油圧回路33を用いて制動油圧を制御することにより、車両制動力を特定制御終了時点の制動操作量に応じた力(0)へ変更する。
(もっと読む)
走行制御装置
【課題】運転者に不快感を与えることなく車輌を緩速走行させる走行制御装置を提供すること。
【解決手段】算出した走行軌跡に沿って車輌を目標速度で緩速走行させる走行制御装置Sは、緩速走行に対し運転者が抱く警戒度を推定する警戒度推定手段102と、警戒度推定手段102の推定結果に基づいて目標速度を決定する目標速度決定手段103と、を備える。また、走行制御装置Sは、駐車支援又は狭路通過支援に利用され、警戒度推定手段102は、算出した走行軌跡に沿って車輌を走行させた場合における周辺物と車輌との間の距離に基づいて警戒度を推定する。
(もっと読む)
車両の速度制限装置
【課題】 後続車両の追い越し行為に起因する事故が発生する虞を低減し、車両の走行安全性を高めることができる車両の速度制限装置を提供する。
【解決手段】 車両の速度を制限するECU1であって、後続車両の追い越し意図を判断する追い越し意図判断手段と、追い越し意図判断手段が、後続車両に追い越しの意図がある、と判断した場合に、車両の速度を制限する特定速度制限手段とを備える。特定速度制限手段は、追い越し意図判断手段が後続車両に追い越しの意図がある、と判断したときの速度以下の速度に前記車両の速度を制限する。その一方で特定速度制限手段は、後続車両との相対速度が所定値以上である場合には、追い越し意図判断手段が後続車両に追い越しの意図がある、と判断したときの速度に車両の速度を制限する。
(もっと読む)
車両制御装置
【課題】車間距離制御や定速走行制御を行う車両制御装置において、隣接車線を走行する車両が自車両の前方に割り込んでくる可能性を適切に判断し、車両の制御を行なうこと。
【解決手段】車両に搭載され、車間距離制御及び定速走行制御を行う車両制御装置1であって、自車両が走行する車線に隣接すると共に走行方向が略同一の車線である、隣接車線における所定範囲内を走行する車両を検出する、車両検出手段を備え、車両検出手段により複数の車両が検出され、且つ検出された車両間の相対関係が所定条件を満たす場合には、自車両の速度を抑制する速度抑制制御を行なうことを特徴とする。
(もっと読む)
1 - 9 / 9
[ Back to top ]