
Fターム[3D246HA30]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 懸架装置(サスペンション) (28)
Fターム[3D246HA30]に分類される特許
21 - 28 / 28
車線逸脱防止装置及びその方法
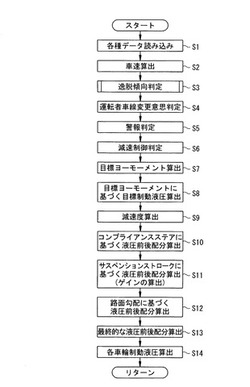
【課題】コンプライアンスステアによるトー角変化を抑制して、自車両の走行車線からの逸脱を防止するために必要な目標ヨーモーメントを適切に得る。
【解決手段】車線逸脱防止装置は、走行車線に対する車両の逸脱傾向を判定する車線逸脱傾向判定手段(ステップS3、ステップS4)と、車線逸脱傾向判定手段が逸脱傾向があると判定した場合に、車輪の制動力を制御して、左右輪に制動力差を発生させることで車両にヨーモーメントを付与する制動力制御手段(ステップS13、ステップS14)と、車輪に制動力を発生させる際に生じるコンプライアンスステアによるトー角変化を基に、制動力制御手段が車輪に発生させる制動力を補正するコンプライアンスステア用補正手段(ステップS10)と、を備える。
(もっと読む)
サスペンション制御装置

【課題】 ショックアブソーバの減衰力可変機構などの装置を有しない場合であっても、車両におけるサスペンションの制御を行うことができるサスペンション制御装置を提供する。
【解決手段】 サスペンション制御ECU1は、ばね上加速度、ばね下加速度、ショックアブソーバのストローク量、車速、および舵角に基づいてサスペンションの要求制御量を算出し、ブレーキECU2に送信する。ブレーキECU2は、サスペンション制御ECU1から送信されたサスペンションの要求制御量に基づいて、このサスペンション要求制御量を達成する必要ブレーキ力を算出する。さらに、必要ブレーキ力の制限を付与した指令ぶれ気力を算出し、指令ブレーキ力に基づいてブレーキアクチュエータ8を制御する。
(もっと読む)
車両の旋回挙動制御方法および装置
【課題】旋回挙動制御用左右輪間制駆動力差に起因した左右駆動輪の同方向転動変位によるヨーモーメントの影響を排除して目標ヨーモーメントを正確に達成可能にする。
【解決手段】旋回挙動制御用の左右輪間制駆動力差(制駆動力モーメント)により車両に直接付与されるヨーモーメント、および、左右輪間制駆動力差(制駆動力モーメント)に起因した左右輪の転動変位によるヨーモーメントとの合計ヨーモーメントと、左右輪間制駆動力差(制駆動力モーメント)との関係を求めておき、これを用いて横軸上の合計ヨーモーメントに目標ヨーモーメントMzを当てはめることにより、目標ヨーモーメントMzを実現するのに必要な目標制駆動力モーメント(左右輪間目標制駆動力差)を求め、これを基に左右輪の制駆動力指令値をそれぞれ求めて旋回挙動制御に資する。
(もっと読む)
進行方向加速度推定装置、自動車、進行方向加速度推定方法および車両制御装置
【課題】車両の進行方向加速度をより高精度に推定すること。
【解決手段】自動車1Aは、水平面とほぼ平行な車体フロア面に対し、設定されたピッチ角γだけ前後に傾けられた前後加速度センサ4によって、車両に作用する前後加速度を検出する。そして、制駆動力センサ3FR,3FL,3RR,3RLの検出値の合計と前後加速度センサ4の出力値を用い、(1)式に従って路面傾斜角θを算出する。さらに、その路面傾斜角θを用いて算出した進行方向加速度αの積分値から、車体速vを算出する。したがって、通常の車両走行状態において、(1)式における分母sinγがゼロとなることを防止しつつ、積分を用いることなく路面傾斜角θを推定するため、路面傾斜角θをより高精度に推定できる。さらに、その路面傾斜角θを用いて、進行方向加速度αを算出するため、進行方向加速度αをより高精度に推定することができる。
(もっと読む)
車両の横方向ダイナミクスを制御するための方法及び装置
本発明は、車両(1)の横方向ダイナミクスを制御するための方法、及び車両(1)のための横方向ダイナミクス制御装置に関する。操作条件が満たされた場合には、シャーシ操作が実行される。この操作条件が満たされるのは、測定された横方向ダイナミクス外乱変数の絶対値が、外乱変数限界値よりも大きいときであり、また、下記の諸基準の中の1つ、又は下記の諸基準の中の複数の基準が満たされているときである。
− 車両縦方向速度が車両縦方向速度限界値よりも大きい、
− センサによって測定された実測ヨーレイトが、算出された現在のヨーレイト以下である、
− 運転者によって制動を通して引き起された、ブレーキトルク値を表しているブレーキトルクが、ブレーキトルク限界値以下である、
− 車両ホイールのシャーシスプリングにおける現在のスプリングのたわみを表すスプリングたわみ値が、スプリングたわみ限界値以下である、
− 2つのシャーシスプリングにおける現在のスプリングたわみの差を表すスプリングたわみ差異値が、スプリングたわみ差異限界値以下である、
− 2つの車両ホイールの間のスキッド差を表すスキッド差値が、スキッド差限界値以下である。
(もっと読む)
車両挙動制御装置
【課題】サスペンション装置に特殊な機構を設けることなく、非制動時の乗り心地を良好に維持しつつ制動時のピッチングを効果的に抑制し得る車両挙動制御装置の提供。
【解決手段】この装置は、アンチダイブジオメトリ及びアンチリフトジオメトリを有する前後輪サスペンションを備えた車両に適用される。アンチリフトジオメトリによるアンチリフト効果の大きさはアンチダイブジオメトリによるアンチダイブ効果の大きさよりも大きい。通常、制動中において前後輪の制動力配分が基本配分に調整される。一方、急激な制動操作が開始された場合、制動開始からの所定の短期間においてのみ、前後輪の制動力配分が基本配分に代えて基本配分よりも後輪の制動力配分が大きい第1配分に調整される。これにより、アンチリフト効果の大きさの増大量がアンチダイブ効果の大きさの減少量よりも大きくなって車両全体としてみればアンチピッチングモーメントが増大する。
(もっと読む)
車両の安定性を改善するための車両システムの制御方法
車両の安定性を制御する改良方法が、アクティブヨーコントロールシステム、アンチロックブレーキングシステムおよびトラクションコントロールシステムといった車両安定性制御システムの協調動作によって提供される。これらの方法は、路面摩擦係数μ、車輪スリップおよびヨー偏差を含む路面情報の認識を使用する。該方法は、引き続き、必要に応じて、アクティブダンピングシステムの設定及び/又は駆動トルクの配分を修理して、サスペンションにおけるダンピングを増加/低減させ、かつ車輪でのトルク適用をシフトさせ、それにより車両における著しい荷重のシフトを防ぎ、及び/又は車両ドライバビリティおよび快適性を改善する。アクティブダンピングシステムまたはトルク配分の調整は、予め運転者によって選択されたいずれかの特性を一時的にオーバライドする。  (もっと読む)
(もっと読む)
車両を安定させるための装置及び方法
本発明は車両の横方向の運動を表す、横方向の運動変数の実際値を決定するために備えられた検出装置(10)を含み、横方向の運動変数のための目標値を決定し、横方向の運動の目標値が決定されたしきい値を超えた場合に、所定の安定条件に従って該決定されたしきい値を定義する評価ユニット(11)を含む、車両を安定させるための装置及び方法に関する。該評価ユニット(11)は決定された実際値と、横方向の運動変数に対する決定され場合によっては制限される目標値との比較に応じて、車両の運転安定性が増加するような方法で、車両の長手方向及び/又は横方向の運動に影響を与えるために設けられた車両のユニット(12)を作動させる。横方向の運動変数は車両の傾き角を表す傾き角変数、及び/又は車両の車輪に生じるスリップ角を表すスリップ角変数を有する。  (もっと読む)
(もっと読む)
21 - 28 / 28
[ Back to top ]