
Fターム[3D301EA12]の内容
Fターム[3D301EA12]に分類される特許
1 - 20 / 35
サスペンション装置
【課題】 サスペンション装置の大型化を抑制しつつ電磁アクチュエータのフェイルセーフ機能を設ける。
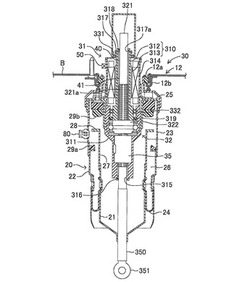
【解決手段】 電磁アクチュエータ30は、電動モータ31とボールネジ機構32とを備える。電動モータ31は、円筒状のロータ310を備え、このロータ310はボールネジナット322に連結される。ボールネジナット322と螺合するボールネジ軸321は、ロータ310の中空部に隙間をあけて挿通される。ロータ310とボールネジ軸321との隙間には粘性油40が封入される。バネ上部材とバネ下部材とが上下方向に相対運動すると、ロータ310とボールネジ軸321との間に封入された粘性油に粘性せん断力が発生し、この粘性せん断力が、バネ上部材とバネ下部材との相対運動を減衰させる。
(もっと読む)
サスペンション装置

【課題】 、電動アクチュエータのモータに供給する電力を変圧するDC/DCコンバータ等の変圧器の出力電圧(モータの駆動電圧)を所定の電圧以下の範囲でできるだけ高くすることができるサスペンション装置を提供すること
【解決手段】 DC/DCコンバータ30の出力電圧は、電力モニタ装置65により検出されて、その検出電圧が出力電圧取得部55に取得される。取得された出力電圧は、電動アクチュエータの作動状態を表す消費電力Wcomに応じて取得される変動電圧ΔVを差し引くことにより補正され、補正された補正電圧V1が基準電圧(47.5V)に近づくように、DC/DCコンバータ30の出力電圧が調整される。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43と、補正手段43における演算で使用する緩衝器2の伸縮速度を当該伸縮速度の変化に応じて補正する速度補正手段44を備えた。
(もっと読む)
サスペンション装置
【課題】 高周波振動入力時にダンパ装置が所望の減衰力を発生するように構成されたサスペンション装置を提供すること。
【解決手段】 本発明のサスペンション装置は、モータ31の回転角速度Vmを取得する状態量演算部51と、状態量演算部51により取得された回転角速度Vmに基づいて、回転角速度Vmの高周波成分に対する減衰力(モータ減衰力fmの高周波成分)fm_filtを演算する減衰力演算部(524,525)と、モータ31が減衰力演算部により演算された減衰力を発生するように、モータ31が出力すべき目標制御力fを演算する目標制御力演算部526と、を備える。そして、目標制御力演算部526により演算された目標制御力fに基づいてモータ31を制御する。
(もっと読む)
サスペンション装置
【課題】緩衝器の発生減衰力の急変を緩和して車両における乗り心地を向上することができるサスペンション装置を提供することである。
【解決手段】上記目的を達成するために、本発明の課題解決手段は、車両における車体と車輪との間に介装されて車体と車輪との上下方向の相対移動を抑制する減衰力を発揮する緩衝器2と、減衰力を調節する減衰力調整機構3と、目標減衰力に基づいて当該減衰力調整機構3を制御する制御装置4とを備えたサスペンション装置1において、制御装置4は、緩衝器2の伸縮速度が0および所定のダンパ速度閾値における緩衝器の発生減衰力の変化を緩和するように目標減衰力を補正する補正手段43を備える。
(もっと読む)
車両のサスペンション装置
【課題】 電磁アクチュエータの電動モータ31の過熱を防止する。
【解決手段】 モータフリー制御部53は、モータ温度Tmが過熱防止開始温度Tmaを超えていると判断した場合には、相間開放用リレーユニット54の各リレーR1,R2,R3をオフ状態にする。これにより、電動モータ31の過熱が防止される。この場合、エアバネ制御部150は、給排装置80からエアバネ装置20に圧縮空気を供給して、エアチャンバ26の内圧を上昇させて、エアバネ装置20のバネ定数を増加させる。これにより、電動モータ31が減衰力を発生できなくても、ストッパ当たりが低減される。
(もっと読む)
車両のサスペンション装置
【課題】 エアバネ装置と、アクティブ制御を行う電磁アクチュエータとを備えたサスペンション装置において、実車高hと目標車高h*とのずれを小さくして、乗り心地の低下を抑制する。
【解決手段】 車高偏差演算部121は、目標車高h*から実車高hを減算することで車高偏差Δhoを演算する。ローパスフィルタ処理部122は、車高偏差Δhoに含まれる高周波ノイズ成分を除去した車高偏差Δhを演算する。モータ力補正量演算部123は、車高偏差Δhに車高補償ゲインKhを乗じることによりモータ力補正量Δfhを演算する。目標モータ力補正演算部124は、目標モータ力演算部116から出力された目標モータ力fmotor*に、モータ力補正量演算部123から出力されたモータ力補正量Δfhを加算して、最終的な目標モータ力fmotor*を求める。
(もっと読む)
サスペンション制御装置
【課題】チャタリングの発生を抑制できるサスペンション制御装置を提供する。
【解決手段】車輪と車体との間に設けられ、車体の上下振動に対して減衰力を発生すると減衰力を変更可能なショックアブソーバと、車両のバネ下上下速度V1を検出するバネ下速度演算部12と、バネ下上下速度V1の包絡波形V1_envを逐次生成する逐次包絡波形生成部14と、包絡波形V1_envに基づいてショックアブソーバの目標減衰力F1を演算する目標減衰力演算部15と、を備える。
(もっと読む)
サスペンション制御装置及び車両制御装置
【課題】 車両をより安全に運転制御することができるようにする。
【解決手段】 複数の車輪2,3のうち輪荷重を増加させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をハード側にすると共に後期をソフト側に切替える輪荷重増加時の縮み行程制御と、伸び行程中の初期をソフト側とすると共に後期をハード側に切替える輪荷重増加時の伸び行程制御と、輪荷重を減少させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をソフト側とすると共に後期をハード側に切替える輪荷重減少時の縮み行程制御と、伸び行程中の初期をハード側とすると共に後期をソフト側に切替える輪荷重減少時の伸び行程制御との少なくともいずれか一つの制御を選択的に行う。
(もっと読む)
車両用電源システム
【課題】設定電圧で駆動される電磁モータを駆動源とする電磁式サスペンション装置を備えた車両に搭載される車両用電源システムの実用性を向上させる。
【解決手段】(i)モータ54の端子電圧EMが設定電圧EDより高く設定されたモータ閾電圧を超える場合と、モータ端子電圧EMがモータ閾電圧以下で、かつ、キャパシタ120の端子電圧ECがキャパシタ閾電圧以上である場合とに、電力消費回路140を作動させず、電力需給状態切換器130によってキャパシタ140の充放電を許容する電力需給許容状態を実現し、(ii)モータ端子電圧EMがモータ閾電圧以下で、かつ、キャパシタ端子電圧ECがキャパシタ閾電圧より低い場合に、電力需給状態切換器130によってキャパシタ120の充放電を禁止する電力需給禁止状態を実現するとともに、電力消費回路140を作動させてキャパシタ120に蓄えられた電力が消費されるように構成する。
(もっと読む)
減衰力制御装置
【課題】ウェーバー・フェヒナーの法則に基づき、振動抑制感といった人間の感度を考慮した最適な補正を行い得る減衰力制御装置を提供する。
【解決手段】ショックアブソーバABの減衰力を制御する減衰制御手段CCと、少なくともばね上の上下方向の加速度及びばね上とばね下との間の相対変位を検出する検出手段DTと、その検出結果に基づき減衰力制御に供する減衰係数を演算する減衰係数演算手段CEとを備える。そして、検出手段DTの検出結果に基づき、ウェーバー・フェヒナーの法則の刺激増分に対応する体感加速度増分を演算する体感加速度増分演算手段WFと、その演算結果の体感加速度増分に応じて減衰係数を補正する補正手段MDを備える。
(もっと読む)
車両のサスペンション装置
【課題】 減衰力変更制御が路面からの振動を減衰することに対して追従できていない場合であっても、乗り心地の悪化を抑制できる車両のサスペンション装置を提供すること。
【解決手段】 サスペンションECU21は、バネ上加速度センサ22から入力したバネ上加速度xpb''を表す信号およびバネ下加速度センサ23から入力したバネ下加速度xpw''を表す信号を比較的高周波側の帯域にてバンドパスフィルタ処理する。そして、バンドパスフィルタ処理によって通過した最大信号振幅bと最大信号振幅aを取得する。次いで、ECU21は、最大信号振幅aに対する最大信号振幅bの比の値と予め「1」以下に設定された性能目標指数αとを比較し、b/aの値がαよりも大きいときは、制御追従性が悪化しているため、バネ上−バネ下相対速度Vが基準相対速度Vo以上のときの要求減衰力Freqを一定の要求減衰力Fconstに設定する。
(もっと読む)
減衰特性制御装置
【課題】路面形状に追従制御し得る減衰特性制御装置を提供する。
【解決手段】ばね上速度検出手段ZS、ばね下速度検出手段YS及び相対変位検出手段RDの検出結果に基づき、減衰係数演算手段CEにて、ばね下に対するばね上追従の運動方程式に供する減衰係数であって、下記の式で表される減衰係数Cabsorberを演算し、この減衰係数に基づき減衰制御手段CCによりショックアブソーバABの減衰力を制御する。
Cabsorber=(Gain*|y-z|/|y'|)*[(T|z'|+L)/|y-z|]p
ここで、z'はばね上速度、y'はばね下速度、|y-z|は相対変位、Tはばね下に対するばね上移動時の間隔時間で、ばね上の動きに対する重み付けパラメータ、Lはばね下に対するばね上停止時の間隔距離、Gainは制御ゲイン、pはアブソーバの中立位置を中心とした制御の有効な範囲の大きさを決めるパラメータである。
(もっと読む)
車両用サスペンション装置
【課題】ばね上部とばね下部との相対動作に対する力を発生させる電磁式のショックアブソーバを含んで構成されるサスペンション装置の実用性を向上させる。
【解決手段】ばね下部12と電磁式のショックアブソーバ20とを弾性体によって弾性的に連結する連結機構22を含んで構成し、ばね下部12とショックアブソーバ20とが設定距離よりも接近している場合における弾性体のばね定数が、離間している場合におけるばね定数より小さくなる構成とする。例えば、中立位置において、ばね定数が小さな第1弾性体86とばね定数が大きな第2弾性体90との間で、ばね下部12とショックアブソーバ20とを連結する弾性体が切り換わるような構成を採用する。そのような構造により、連結機構22が収縮させられる場合には、車両の乗り心地が良好で、離間させられる場合には、接地性が良好な構造のサスペンション装置が実現する。
(もっと読む)
車両用路面変位推定装置
【課題】車両のアクティブ・サスペンション・システムにおける既存のセンサを利用しながら、計算量が少なくて済み、十分な応答性が得られる路面変位の推定装置を提供する。
【解決手段】アクティブ・サスペンション・システムのアクチュエータの制御則として、少なくとも、該アクチュエータから制御対象である車体及び車輪への伝達エネルギを表す項と、該車体及び車輪の振動状態を表す項と、該車体及び車輪の全エネルギ収支を表す項とを、有する関数の積分を最小化するようなものを用いる。この場合、路面変位の推定誤差による悪影響が軽微なものになるので、そのための推定演算式を以下の簡易式(式A)に置き換える。 q0 = α・M1・q1″/K1 ・・・(式A)
但し、αは補正係数、M1はばね下部材3の質量、q1″はばね下部材3の加速度、K1はばね下部材のばね定数である。
(もっと読む)
後輪用サスペンション装置
【課題】操縦安定性を確保しつつ車体に伝達する振動を低減可能な後輪用サスペンションを提供する。
【解決手段】車輪支持部材の下部領域と車体側部材とを弾性ブッシュで連結する2本のロアリンクが車両前後方向に並んで配置され、且つ、その2本のロアリンク同士を弾性ブッシュで連結し、ロアリンク同士を連結する弾性ブッシュとして、低周波領域では低く高周波領域では高い剛性を有するブッシュを使用すると共に、車輪支持部材の下部領域及び車体側部材とロアリンクとを連結する弾性ブッシュとして、低周波領域では、上記ロアリンク同士を連結する弾性ブッシュよりも剛性が高いブッシュを使用する。
(もっと読む)
車体振動の抑制制御方法
【課題】空気ばねの状態変化の影響を受けにくくして、車体の上下振動を効果的に抑制する。
【解決手段】走行中の台車1の上下速度を求め、この求めた台車1の上下速度を元に、例えばポリトロープ変化を時間微分して表現した空気ばね内圧の時間導関数から、空気ばね3に給排気する空気流量を決定する。その際、台車1の上下速度を、振動を抑制したい周波数を選択して得たフィルタで処理し、空気ばねに給排気する空気流量を決定する。
【効果】補助空気室を必要以上に増加させることなく、空気ばねの状態変化の影響を受けにくくして、車体の上下振動を効果的に抑制できる。その際、振動を抑制したい周波数を選択して得たフィルタで処理すれば、抑制したい周波数、抑制効果の大きさ(空気消費量の大きさ)を指定できる。
(もっと読む)
車両用サスペンションシステム
【課題】前後左右の4つの車輪に対応して設けられ、ばね上部とばね下部との相対動作に対する力を発生させる4つの電磁式ショックアブソーバを含んで構成されるサスペンションシステムの自己診断機能を実用的なものとする。
【解決手段】4つのショックアブソーバが有する電磁式モータの各々を車体にワープ力が作用するようなアブソーバ力を発生させるように作動させる制御(S10)を実行し、その制御の実行中における車体の挙動に基づいて、システムの失陥の有無を判定する(S11)ように構成する。4つのショックアブソーバによって車体にワープ力を作用させても、車体の剛性が高く、車体が動作することはないため、本サスペンションシステムによれば、自己診断のために4つのショックアブソーバの電磁式モータを作動させても、正常であれば車体を動作させないようにすることが可能である。
(もっと読む)
車両の走行制御装置
操舵制御手段、制駆動力制御手段、接地荷重制御手段を備えた車両に於いて、演算負荷や消費エネルギの増大を抑制しつつ各制御手段の制御量を最適化し、車両の走行運動を最適に制御する。
【解決手段】車両が緊急の走行運動制御を必要とするときには(440、450)、全ての制御手段についての評価関数を演算して車両全体の目標走行運動制御量を全ての制御手段に配分することにより各制御手段の目標制御量を演算し(700)、車両が緊急の走行運動制御を必要としないときには、車両の走行状態に基づいて特定の制御手段の目標制御量を演算し、特定の制御手段の目標制御量に基づいて特定の制御手段の制御による車両の物理量の変化量を演算し、車両全体の目標走行運動制御量及び車両の物理量の変化量に基づいて他の制御手段の目標制御量を演算する(500、600)。
(もっと読む)
車両状態推定装置
【課題】 振動モデルを用いた車両状態量の算出を精度良く行う。
【解決手段】 振動モデル記憶手段M1はばね下部分、ばね上部分、ダンパー、タイヤおよび懸架ばねから構成される振動モデルを記憶し、実相対距離検出手段M2はばね下部分およびばね上部分の実相対距離を検出し、偏差算出手段M3は振動モデルにより推定したばね下部分およびばね上部分の推定相対距離および前記実相対距離の偏差δを算出する。入力パラメータ算出手段M4は前記偏差δに基づいて路面から振動モデルに入力する入力パラメータx0を算出し、車両状態量算出手段M5は前記入力パラメータx0を振動モデルに適用して車両状態量を算出する。このように、ばね下部分およびばね上部分の推定相対距離および実相対距離の偏差δに基づいて算出した入力パラメータx0を振動モデルに入力して車両状態量を算出するので、実相対距離を検出するだけで路面変位を含む複数の車両状態量を精度良く算出することができる。
(もっと読む)
1 - 20 / 35
[ Back to top ]