
Fターム[3F022NN33]の内容
Fターム[3F022NN33]に分類される特許
1 - 5 / 5
搬送システムの復旧方法
【課題】搬送停止場所の近くから現況確認の結果とその後の運転の方法を指示することにより、搬送システムの復旧作業を容易にするとともに、搬送システムの維持にかかる人員を削減することができる搬送システムの復旧方法を提供すること。
【解決手段】複数機種の装置を相互にネットワークで接続した搬送システムにおいて、ある装置で搬送停止が起きた場合に、装置に直接接続された操作装置以外に、ネットワークを介して間接的に接続した操作端末装置により、装置の現況確認とその後の運転方法を入力する。
(もっと読む)
貯蔵設備

【課題】収納棚の開口端面よりもピッキング装置側にはみ出している荷物にピッキング装置が干渉することを防止し、荷物の格納作業及び搬出入作業の効率化を高めることが可能な貯蔵設備を提供する。
【解決手段】対向配置した対をなす収納棚S1、S2間に収納棚S1、S2の幅方向に沿って移動可能なピッキング装置を設け、このピッキング装置に、各単位収納スペースに収納されている荷物Nが前記開口端面Saよりもピッキング装置側にはみ出している状況を把握するためのカメラ94を備え、カメラ94からの情報に基づいてピッキング装置を手動操作するための手動操作手段を設けた。
(もっと読む)
搬送車用の送信機
【課題】作業者の操作性を損なわせることなく、作業者の意思をより確実に反映させた状態で搬送車に対し走行の指示を行うこと。
【解決手段】有人運転モード及び無人運転モードの何れかで走行可能な牽引車に対し、無人運転モード時に遠隔操作によって走行を指示する送信機に、走行指示を行う際に操作する連続走行ボタン28a及び寸動走行ボタン28cと、これらのボタン操作を有効とするために操作する走行開始ボタン28dを設ける。そして、走行開始ボタン28dが操作されてから有効時間T1が経過する迄に連続走行ボタン28a又は寸動走行ボタン28cが操作されると、走行指示信号を送信する。また、有効時間T1の経過時迄に連続走行ボタン28a又は寸動走行ボタン28cが操作された場合、以降はこれらのボタン操作が終了してから有効時間T2が経過する迄に再びボタン操作されることにより走行指示信号を送信する。
(もっと読む)
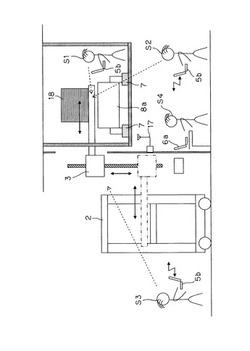
無人搬送車の検品搬出方法
【課題】搬送中に搬送物の種類や数量を検品し、その結果に基づき搬送先を自由に変更して搬送システムをシンプルに維持し高い搬送効率を維持することができる無人搬送車の検品搬送方法を提供する。
【解決手段】検品ステーション11を通過する無人搬送車2の情報およびその通過時点を管制制御コンピュータ4aから検品用コンピュータ18に伝達し、この伝達信号を受けて、検品ステーション11を通過する当該無人搬送車2上の各搬送物に取り付けたタグ12のみを管制制御装置4で用いる無線通信方式とは異なる無線通信方式を用いて無線により非接触で検出し、検品用コンピュータ18が管制制御コンピュータ4aを介して当該無人搬送車2に検品結果を発信し、その検出データに基づいて搬送物の数量および種類に異常がないかどうかを判断し、異常がある場合には搬送経路を変更して保守ステーション23に荷置きする。
(もっと読む)
ストッカ
【課題】省スペース且つ高効率にする。
【解決手段】カセット6を入出庫させる搬入ポート14/搬出ポート15と、前記カセット6を保管する棚23と、前記棚23から前記カセット6を載置/取出するスタッカロボット9とをストッカ本体内部に備える。前記搬入ポート14の垂直方向近傍に搬入ポート用待機領域38が設けられ、前記搬出ポート15の水平方向近傍に搬出ポート用待機領域39が設けられる。前記搬入ポート14内と前記搬入ポート用待機領域38との間で、前記カセット6を垂直移動させる昇降ユニット11と、前記搬出ポート15内と前記搬出ポート用待機領域39との間で、前記カセット6を水平移動させる水平駆動ユニット3とをそれぞれ備える。前記スタッカロボット9は搬入ポート用待機領域38及び搬出ポート用待機領域39と前記棚23との間で前記カセット6の載置/取出を行う。
(もっと読む)
1 - 5 / 5
[ Back to top ]