
Fターム[3F029CA81]の内容
物品の積み重ね及び付属装置 (962) | 上からの積重ね手段 (263) | 吸着装置 (27)
Fターム[3F029CA81]の下位に属するFターム
Fターム[3F029CA81]に分類される特許
1 - 2 / 2
パレタイザーのためのハンドリングロボット
本発明によれば、ハンドリングロボットは垂直伸縮マスト(11)を含み、垂直伸縮マスト(11)は、垂直に固定されたベース(20)及び同期された動作の複数のセクション(21〜23)を備え、前記動作は速度及び加速度が制御され且つ重力伸長動作及び動力退避動作を含み、それぞれのセクションは個々に駆動され、最後のセクション(23)はパレットに載せられる製品(3)を把持するためのヘッド(13)を担う。該ロボットは、異なるセクション(21〜23)を動かすための共通の駆動シャフト(30)を含み、前記シャフト(30)は、それらがそれぞれ伝達部材を経由して操作するセクション(21〜23)の移動に適した直径を有するホイールを含む。ホイール(31、32)及びそれらのセクション(21、22)の間の伝達部材は、対応するホイール上に巻き付くベルトから構成される。把持ヘッドを担う最後のセクション(23)に関しては、伝達動作がチェーンにより実行される。ハウジング(46)は、各動作伝達チェーンの自由端を受容して、格納し、それぞれ曲がったらせん経路を規定するノッチを備えたブロックの形態で作られる。 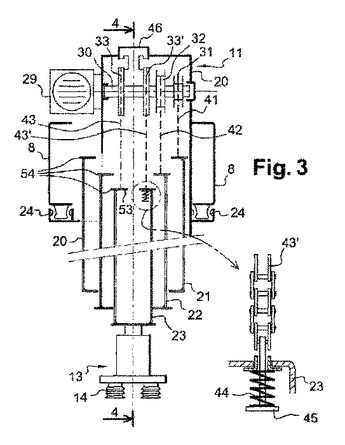 (もっと読む)
(もっと読む)
PTP段積み装置
【課題】ピロー包装の前工程でPTPを段積みするPTP段積み装置において、様々な段積み数に対応できるとともに、段取り替えの容易なものを提供する。
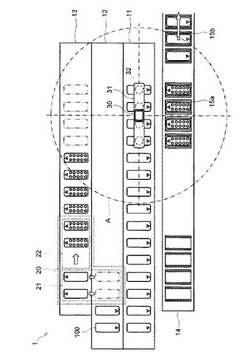
【解決手段】PTP段積み装置1は、PTP100を搬送する第1主コンベア11と第2主コンベア12、第2主コンベア12に並走する副コンベア13、第1主コンベア11、第2主コンベア12、及び副コンベア13の末端に一部が近接配置された段積み用コンベア14、第2主コンベア12上のPTP100を上下反転して副コンベア13に載置する反転移載装置20、及び、第1主コンベア11と第2主コンベア12の上に上下反転無しの状態で存在するPTP100と、副コンベア13上の上下反転有りのPTP100を所定の段積み順序で段積み用コンベア14の第1群のバケット15aまたは第2群のバケット15bに積み上げるロボット30を備える。
(もっと読む)
1 - 2 / 2
[ Back to top ]