
Fターム[3F029CA82]の内容
物品の積み重ね及び付属装置 (962) | 上からの積重ね手段 (263) | 吸着装置 (27) | 真空吸着 (23)
Fターム[3F029CA82]の下位に属するFターム
吸着ベルト
Fターム[3F029CA82]に分類される特許
1 - 20 / 23
丁合機
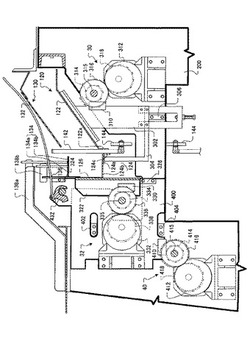
【課題】被丁合物またはその丁合物の寸法が変化しても簡単に対応することができて不良の発生を抑えることができる丁合機を提供する。
【解決手段】横方向に延びる搬送通路と、搬送通路に沿って被丁合物を搬送する搬送手段と、搬送通路に沿って一方の側に横方向に一列に並んで被丁合物を載置する給紙台を備える複数の給紙コマと、各給紙コマの給紙台に載置された被丁合物を順次搬送通路に供給する給紙手段と、を備える。搬送通路には、重ね合わされた被丁合物が搬送される下段テーブル120と、各給紙コマに対応して、各給紙コマから取り出された被丁合物を一旦受ける上段テーブル130と、が設けられ、下段テーブル120が上段テーブル130及び給紙台に対して上下方向に調整可能に構成される。
(もっと読む)
ベニヤシート積層装置

【課題】ベニヤシートを積層体上に速くかつ正確に配置積層装置を提供する。
【解決手段】積層装置はベニヤシートを積層ポイントへ運搬するコンベア手段と、ベニヤシートを積層体上に配置する手段とから構成される。コンベア手段は、ベニヤシートの対向する面に配置された第1のコンベア要素6と第2のコンベア要素9とを備え、第1のコンベア要素および第2のコンベア要素には磁気要素が設けられ、コンベア要素の間に供給されるベニヤシートは、コンベア要素の間にて所望の力で押圧されるとともに、積層ポイントへ移動され、積層ポイントにはベニヤシートを停止させるための停止手段43と、ベニヤシートをコンベア要素の間から解放して積層体1上へ配置する手段とが設けられている。
(もっと読む)
物品分類装置
【解決手段】 物品分類装置2を構成するストッカ5は、分類トレイ4を複数整列した状態で載置する第1〜第5スライド板21A〜21Eと、これらスライド板を上下に複数段保持するとともに各スライド板を水平方向に往復動させる駆動機構22とを備えている。またストッカに近接した位置には空トレイ供給手段7が設けられている。
第1移載手段6がLED素子1をランクに応じて対応する分類トレイに移載する際、上記ストッカはスライド板を移動させて、該物品に対応した分類トレイを露出させる。
所要の分類トレイに所定数の物品が収容されると、第1移載手段は上記空トレイ供給手段に保持された空の分類トレイを、上記所定数の物品が収容された分類トレイに積み重ねる。
【効果】 省スペースながら物品を多数の種別に分類することが可能であり、かつ可動効率を良好なものとすることができる。
(もっと読む)
パレタイザー
【課題】缶体の各段間にセパレートシートを1枚のみ確実に供給できるパレタイザーを提供する。
【解決手段】パレット11上に缶体12と矩形のセパレートシート13とを交互に多段に積み重ねるパレタイザー10であって、パレット11上に複数の缶体12を配置する缶体供給部20と、パレット11上に配置された缶体12上にセパレートシート13を載置するシート供給部30とを備え、シート供給部30は、複数のセパレートシート13を積み重ねた状態で保持するシート保持部と、このシート保持部から最上段のセパレートシート13を吸着パッド51により吸着し持ち上げて搬送するシート搬送部とを有し、セパレートシート13を持ち上げる際にセパレートシート13の角部に当接するシート押さえ部42が設けられるとともに、吸着パッド51はこのシート押さえ部42よりも内側でセパレートシート13を吸着する。
(もっと読む)
積層体形成装置、積層体形成方法、ガラス基板の製造方法、ガラス基板及び磁気記録媒体
【課題】 積層体の形成を自動化できる装置を提供する
【解決手段】積層体形成装置200はガラス基材載置部21とスペーサ載置部18を有し、ガラス基材載置部21とスペーサ載置部18の間には積層体載置部17を有している。
ガラス基材載置部21にはエアシリンダ20および電動アクチュエータ19が設けられ、これらの装置によってB1、B2、C1、C2の向きに移動可能である。
また、積層体形成装置200は側壁4がE1、E2の向きに移動可能に設けられている。
さらに、側壁4には側壁8が移動可能に設けられている。
また、側壁8にはガラスチャック10およびスペーサチャック13がD1、D2の向きに移動可能に設けられている。
(もっと読む)
安全なアクセスを組み合わせたパレット輸送装置
【課題】小型の装置であってパッケージ機械とパレタイザとを一体化した装置を改良すること。
【解決手段】装置は、上記パレット輸送ステーションへのアクセスを提供するドア(7)が設けられた同一の筐体(1)内に配置されており、製品(8)をパッケージする機械(2)と、ロボット式のパレット輸送ステーションと、で構成されている。この装置は、ロボットのグリップヘッド(7)の移動を制限空間内に集めるために、上記閉鎖した筐体1)内における上記ロボット(15)の運動範囲を制限する手段を備え、制限空間は、筐体(1)内であってドア(7)の近傍に位置する無形バリアから測定された最小距離に応じて規定された安全空間と重ならない。ロボット(15)の運動範囲を制限するこれら手段は、電動タイプのカムであって当該カムが上記ロボットの操縦制御部の制御下で上記ロボット(15)のロボットの主軸no.1回りにおける運動範囲を制御し、また、ロボットの運動速度を低減する。
(もっと読む)
容器群積付け装置及び積付け方法
【課題】簡易な装置構成で多様な形状、素材、剛性及び重量の容器を損傷させずに、又、多様な配列の容器群の寸法差異や整列状態の乱れ、あるいは容器の欠落に影響を受けないでパレット上に容器群を安定して段積みできる積付け装置及び方法を提供する。
【解決手段】容器群積付け装置1は、幅広い種類の容器に対応可能な吸引ヘッド2、その移動手段及び負圧供給手段4を具備する保持搬送装置10を備えており、保持搬送装置10の吸引ヘッド2を移動手段で移動させて一連の段積み操作を行う。即ち多列ステージ22に整列された容器群を吸引ヘッド2で吸引保持した後、セパレートシート供給装置23で供給されたセパレートシート上に移動する。そこで、吸引ヘッド2に吸引保持された容器群の下側にセパレートシートを更に吸引保持した後、パレット20上に搬送し、両者を一体でパレット20に積む。この操作を繰り返して段積みを完了する。
(もっと読む)
保持搬送装置
【課題】種々の重量や形状を有する物品を、塑性変形や破損を起こさせることなく、且つ充分な吸引力によって安定して保持して搬送することが可能な保持搬送装置を提供する。
【解決手段】本発明の保持搬送装置1は、複数の吸引孔を有する物品吸着面が設けられた吸引ヘッド2と、吸引ヘッド2の吸引室9に連結された負圧供給手段4とを備えている。この負圧供給手段4は、吸引ヘッド2が物品吸着面に物品を当接させて物品を吸引保持する際に、前記物品吸着面のほぼ全領域に前記物品が配置されて大多数の吸引孔から外気を直接吸引しない状態で前記物品をほとんど塑性変形させることなく吸引保持することができ、且つ、前記物品吸着面に物品が当接していない領域が広く前記物品に当接していない多くの吸引孔から外気を直接吸引する状態でも物品の吸引保持を維持できるような負圧を吸引ヘッド2にもたらすことができるよう広い風量の領域に対して低くフラットな吸込み側静圧特性を有している。
(もっと読む)
薄板状基板の梱包方法および梱包装置
【課題】合紙の使用枚数を半減することができる薄板状基板の梱包方法および梱包装置を提供する。
【解決手段】吸着パッド11は、合紙2の切れ目部分21を吸着し、吸着した切れ目部分21を、切れ目に沿って斜め上方に持ち上る。移載アーム12は、1枚の薄板状基板3を吸着し、吸着した薄板状基板3を合紙2のベース部分23の上に載せる。吸着パッド11は、吸着して持ち上げていた切れ目部分21を下ろし、ベース部分23の上に載せられた薄板状基板3の上に、吸着した切れ目部分21を被せるように載せ、吸着を解除する。移載アーム12は、次の薄板状基板3を吸着して搬送し、1つ前の薄板状基板3の上に載せられた切れ目部分21の上に、吸着した薄板状基板3を載せる。吸着パッド11および移載アーム12は、積み重ねた薄板状基板3の枚数が、予め定める枚数になるまで、この一連の動作を繰り返す。
(もっと読む)
パレットを用いたパネルの積取装置
【課題】 パレットを用いたパネルの積取作業において、作業性の向上を図るとともに、機能的な作業空間の利用が可能なパネルの積取装置を提供すること。
【解決手段】 パネル受入部2、受け入れたパネル1を搬送するパネル搬送部3、パレット受入部6、受け入れたパレット5を搬送するパレット搬送部7、パレット5に所定数のパネル1を搭載するパネル搭載部8、およびパネル1を搭載したパレット5を搬出させるパレット搬出部10を有するパネルの積取装置において、パレット搬出部10がパレット受入部6の上方に配置され、かつ、パレット受入部6とパレット搬出部10が同一方向に対向することを特徴とする。
(もっと読む)
板材加工システム
【課題】 板材加工機によって切り取られた複数の製品板材を、コンパクトに集積することができ、次工程への運搬が容易な板材加工システムを提供する。
【解決手段】 素材板材W0から複数の製品板材を切り取る板材加工機1と、切り取られた製品板材を積載する板材集積台車3と、板材加工機1から板材集積台車3へ製品板材を搬出する板材搬出装置2とを備える。板材集積台車3は、製品板材を積層状に積み重ねて積載する平面置き部32と、製品板材を立て掛けて積載する立掛け部31とを有する。板材搬出装置2は、走行可能な走行体13と、この走行体13に設けられた製品保持具20と、前記立掛け部31の角度に合わせて製品保持具20を傾動可能な傾動機構と、製品板材を板材集積台車3の平面置き部32または立掛け部31に仕分けて積載するように走行体13、製品保持具20、および傾動機構を制御する搬送制御装置とを有する。
(もっと読む)
パレタイジング装置
【課題】パレットの変形に伴うそのパレットとワークの干渉を回避できるようにし、もって流通過程でのパレットのある程度の変形を許容できるパレタイジング装置を提供する。
【解決手段】ハンド6とアーム5の結合部に揺動機構10を介在させ、ハンド6にフローティング自由度を持たせたフローティング状態と、ハンド6のフローティング自由度を拘束した非フローティング状態とのいずれかに選択切換可能に構成してある。ハンド6が把持しているワークWを水平姿勢にてパレット2に積載するにあたり、ワークWがパレット2の上面開口部を通過する直前にハンド6をフローティング状態に切り換え、パレット2の一部の変形に起因するワークWとの干渉を自律的に回避させる。
(もっと読む)
ワーク積載方法及びワーク取り出し装置
【課題】ロボットの手首部分に取り付けられたワーク取り出し装置とパレットの干渉の無いワーク取り出し装置を提供する。
【解決手段】第1のパレット4から取り出したガラス3を第2のパレット5に積載する際に、吸着保持機構部(ワーク保持手段)19が第2のパレット5を構成する一組のワーク支持部材50,50間のガラス載置部55に進入すると共に、跳ね上げ部材20、高さ倣い手段21、幅方向倣い手段22及び仕切板差込み手段23(跳ね上げ機構部)が前記ガラス載置部55と第2のパレット5の外枠52との間に進入し、さらに、前記ワーク押さえ手段61が第2のパレット5の外枠外に位置するように構成した。
(もっと読む)
樹脂製容器の製造装置および方法
【課題】樹脂製容器の製造効率を高めることができる製造装置および方法を提供する。
【解決手段】成形シートBを成形する成形機2と、成形シートBを切断し個別の容器Cとする切断装置7と、容器Cを移送し他の容器Cに積み重ねる移送装置8とを備えた樹脂製容器の製造装置1。切断装置7および移送装置8をそれぞれ複数備え、成形シートBを複数の経路L1、L2で切断、移送できる。成形機2と切断装置7との間に、成形シートBを2つの複数の経路L1、L2に振り分ける振分け機構6が設けられている。
(もっと読む)
ガラス搬送ロボットハンド
【課題】 搬送ロボットハンドにより、ガラス板をパレットへ積みつける際に、ガラス板のズレ現象を防止するため、合紙をガラス板間に挟むようにするが、その合紙もガラス板と同時にパレットへ搬送できるロボットハンドにする。しかし、その搬送の際に風圧による合紙のめくれと、パレット積載時の合紙の垂れ下がりとによるトラブルを防止し、効率的なガラス搬送ロボットハンドを提供する。
【解決手段】 二つの課題を解決するため、ガラス搬送ロボットハンド10に吸着されたガラス板1面前に対向して合紙2を配置させると共にそれら面間にブローによるブローダウンする風を送り吸着させ、その風向をガラス面と合紙の4角の対向面方向に特に向け、搬送中のめくれ、と、積付け時の垂れ下がりを発生させないことを特徴とするガラス搬送ロボットハンド。
(もっと読む)
オートパレタイザ
【課題】ローダの高速化を確実に実現できるオートパレタイザを提供すること。
【解決手段】ローダ3が製品を製品搬送方向に対して直交する水平なX軸方向、製品搬送方向と平行なY軸方向、および製品搬送方向に対して直交する鉛直なZ軸方向に移送するように構成されているオートパレタイザ1であって、ローダ3を、架台6と、架台6に対して架設された横行レール7と、この横行レール7をX軸方向に駆動する電動サーボモータ11と、横行レール7に取り付けられたメインキャリア16と、このメインキャリア16をY軸方向に駆動するリニアモータ17と、メインキャリア16に取り付けられた鉛直なポスト19と、このポストをZ軸方向に駆動する電動サーボモータ22と、ポスト19の下端に取り付けられて製品を保持する保持手段5とで構成した。すなわち、メインキャリア16のみをリニアモータ17で駆動する。
(もっと読む)
物品段積み装置
【課題】段積み数設定の自由度が大きく、物品を傷めることの少ない物品段積み装置を提供する。
【解決手段】物品段積み装置1は、第1群のバケット11aを第1駆動系統12aで、第2群のバケット11bを第2駆動系統12bで、独立して駆動可能な授受コンベア10を備える。物品搭載装置がバケット11a、11bに物品2を1個ずつ搭載する。第1群と第2群のいずれかのバケットに物品搭載装置が物品2を搭載している間、物品搭載済みの他群のバケットから移載装置40が物品2をピックアップし、段積み用コンベア50の第1群のバケット51aまたは第2群のバケット51bに積み上げる。制御装置は、物品搭載装置による物品2の搭載と、移載装置40による物品2のピックアップが円滑に進行するように第1駆動系統12aと第2駆動系統12bを制御する。
(もっと読む)
樹脂成形品の集積方法及びその集積装置
【課題】樹脂成形品の排出処理に関し、集積化を行うとともに、搬送処理や計数処理の容易化を実現する。
【解決手段】樹脂成形機(4)から取出した樹脂成形品(6)をテーブル(10)に載置する工程と、このテーブルに載置した樹脂成形品を成形品整列手段(側板44、押出シリンダ46、ストッパ47)により整列させる工程と、この整列させた樹脂成形品を段積手段(段積部14、ガイド治具16)に段積みする工程と、この段積みされた樹脂成形品を帯封手段(帯封機18)により帯封する工程と、を含む構成である。
(もっと読む)
物品積み付け装置
【課題】構成の簡素化を図りながら、物品を物品収納体に積み付けることができる物品積み付け装置を提供する点にある。
【解決手段】サイズ又は重量が異なる複数種の物品1を物品積み付け箇所Aに搬送する搬送手段2と、搬送手段2にて物品積み付け箇所Aに搬送されてきた物品1を把持して物品収納体3に積み付ける物品移載手段4と、物品移載手段4の作動を制御する積み付け制御手段5とが設けられ、物品1に装備された情報記憶タグ13に記憶された物品1のサイズ又は重量を示す物品情報を読み取る読み取り手段14が設けられ、積み付け制御手段5が、読み取り手段14にて読み取られた物品情報、及び、予め設定された積み付け予定パターンに基づいて、積み付け予定パターンにて物品1を積み付けるべく、物品移載手段4の作動を制御するように構成されている。
(もっと読む)
アキュームレーターおよびパレタイザー
【課題】飲料用ボトルのキャップ等の小物物品をスムーズに整列配置できるアキュームレーターを提供する。
【解決手段】搬送手段により供給される複数の物品Wを搬路11上に一時滞留しておくアキュームレーターであって、搬路下流端部に設けられ、この搬路11上に滞留する物品Wを進退させて平面状に整列させる整列機構12を備える。整列機構12は、搬路11の幅方向に設けられて、その中央部を支点として搬路方向に揺動可能な可動部材13を備え、可動部材13の揺動にて、物品Wを進退させる。
(もっと読む)
1 - 20 / 23
[ Back to top ]