
Fターム[3F029DA08]の内容
物品の積み重ね及び付属装置 (962) | 物品の載置体(受け体) (176) | パレット (102) | ローラ付 (5)
Fターム[3F029DA08]に分類される特許
1 - 5 / 5
積層体形成装置
【課題】 積層体形成装置を提供する。
【解決手段】 積層体形成領域12と、偏平部材28によって形成される積層体30を積層体形成領域12内で支持するための支持装置とを備えた、搬送方向Aに運ばれて来る多数の偏平部材28、特にフィルムカットシートまたは紙カットシートによって積層体30を形成するための積層体形成装置、特に紙を加工する産業の設備内の積層体形成装置について記載されている。本発明の特徴は、支持装置が独立した多数の支持要素22を備え、この支持要素が偏平部材28の搬送方向Aにおいて少なくとも相前後して配置され、かつ偏平部材28の搬送方向Aに対して角度をなして、特に偏平部材28の搬送方向Aに対してほぼ直角に配置され、および/またはほぼ垂直方向に移動可能に支承されていることにある。
(もっと読む)
幅寄せ装置、パレタイズ搬送システムおよびパレタイジング方法

【課題】小型且つ低コストの幅寄せ装置を提供し、全体の作業効率についても向上させる。また、上記幅寄せ装置を用いたパレタイズ搬送システムやパレタイジング方法を提供する。
【解決手段】本発明の幅寄せ装置1を、パレタイジングロボット103によってパレット2上に隙間をあけて載置された複数のワークを、整列面3a,4aを有する幅寄せ体3,4を水平方向に移動させて該整列面3a,4aを押し付けることで、該パレット2上にて密着整列させる幅寄せ装置とする。上記幅寄せ体3,4は、互いの整列面3a,4aが直交方向をむくように一対配置する。そして、一方の幅寄せ体3をその整列面3aの向きに移動させるとともに他方の幅寄せ体4をその整列面4aの向きに移動させる水平駆動機構を備える。
(もっと読む)
積付装置
【課題】効率よく積付作業ができる積付装置を提供する。
【解決手段】積付装置1は、物品Wを搬送部2上に載せて搬送する供給用搬送手段3と、突出位置および退避位置との間で昇降可能で突出位置への上昇により搬送部2上の物品Wを持ち上げる昇降手段4とを備えている。積付装置1は、供給用搬送手段3に近接して設けたパターン配列用搬送手段5と、物品Wを保持して移送するロボット8とを備える。ロボット8は、供給用搬送手段3の上方の保持位置とパターン配列用搬送手段5の上方の保持解除位置との間で水平方向にのみ移動する水平移動部66を有する。水平移動部66に昇降手段4上の物品Wを保持する物品保持部67を設ける。
(もっと読む)
パレタイズ装置用台車及びパレタイズ装置
【課題】 大がかりなロボット等を使用せずに、パレタイズ作業の無人化を可能とする。
【解決手段】 複数の荷物を受け具に積載するパレタイズ装置において、下流部に荷物排出口を有するコンベア装置と、移動可能な台部と、前記台部に鉛直方向に移動可能に設けられ、上面に重量感知手段を備えた荷物受け部とから構成される自走式台車とを備え、前記台車は、前記荷物のデータを入力する入力手段と、
前記入力手段により入力されたデータ及び前記重量感知手段により得られた積載荷物の重量及び位置データに基づいて、前記台部の移動及び/又は前記荷物受け部の鉛直方向の移動を行う制御手段を具備することを特徴とするパレタイズ装置。
(もっと読む)
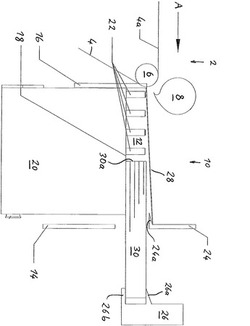
物の積重ね及び積降し装置
本発明は、特定ボックス内の物品(8)を取扱う装置であって、物品(8)の積重ねまたはスタック(4)からの物品(8)の積降しを行なうための、物品(8)のスタック(4)のリフト手段(10、12)と物品(8)のコンベア手段(6)との間に配置されたスタッキングホイール(1)を有する装置に関する。スタッキングホイール(1)が回転するとき、その回転方向に従って、物品(8)がコンベア手段(6)からリフト方向(10、12)のスタック上に移動されるか、これとは逆に移動される。スタッキングホイール(1)は、その周囲に分散配置された対をなす保持板を有し、該保持板には旋回フィンガが取付けられている。旋回フィンガは、スプリングによりこれらの作動位置に押圧されており、この作動位置において保持板の表面上に突出し、かつ物品(8)がスタッキングホイール(1)により移動されるときに物品(8)の受入れ開口内に嵌合される。  (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]