
Fターム[3F072KA32]の内容
Fターム[3F072KA32]に分類される特許
1 - 6 / 6
食品類の搬送方法及びその搬送装置
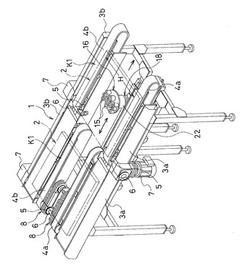
【課題】食品の製造工程において最終醗酵工程と焼成工程とを食品生地類を載置した展板に振動を与えずに、旋回し移載する食品類の搬送方法及びその搬送装置を提供する。
【解決手段】コンベヤ装置1は、パン製造工程の最終醗酵工程と焼成工程とを結ぶ搬送経路を、複数台の直線状の搬送コンベヤK1とカーブ状の搬送コンベヤとで構成し、接続部に、展板2の底面を接触または非接触で吸着保持し、展板2に上下の振動を与ずに先の搬送コンベヤから後の搬送コンベヤに移載する移載搬送手段8を設ける。搬送コンベヤに並列なコンベヤベルト4a,4bの間には、展板2の底面を接触または非接触で搬送コンベヤの上面と水平に保持する複数個の吸着保持手段15を表面に設けた昇降かつ旋回可能な円形状のターンテーブル16を設置し、このターンテーブル16の裏面側中心部に設けた支持軸をスライド搬送手段18上に立設する。
(もっと読む)
コンベア反転装置及びそれを用いた検査装置

【課題】 駆動ドラムにより、2本のエンドレスベルトを作動させ、該エンドレスベルトの間にワークを挟んだ状態で搬送し、ワークの上下を反転させる反転装置における、ワークの品種の違いへの対応性を向上させる。
【解決手段】 ドラムを、ドラム基部11と複数のドラム分割体12を組み合わせる構造とし、ドラム分割体12に、ワークの形状に対応した突起16と溝17体を設けておく。ドラム分割体はネジ止めなどの方法で接合され、エンドレスベルトが当接していない部分を順次交換できるので、エンドレスベルトの掛け替えなどの付随する作業が不要となり、工数削減と作業性の向上が可能となる。
(もっと読む)
第1ユニットから第2ユニットへ包装容器を移送するための方法と配置
本発明は、包装ラインにおける2つのユニット間で運動パターンを同期させるための方法と移送装置とに関し、1つのユニットは断続的に作動され、第2のユニットは連続的に作動される。本発明は特に、断続的に作動される充填ユニットと、連続的に作動される箱詰め機との間の移送装置を対象としている。移送装置は、チューブ・ピッカー/プレーサー(28)を支持するために配置されたフレーム(13)が備えられ、第1シャフトと第2シャフト(16,31)を中心とする同時旋回運動を行うために配置されており、第2シャフト(31)に直角の第3シャフト(48)を中心として回転を行うためである。フレームはさらに、チューブ間の間隔を調節するための手段と、充填ユニットの部分的に円形のコンベヤから容器が取り上げられる場合、回転運動の間、垂直位置での相違を相殺するための手段とが備えられている。  (もっと読む)
(もっと読む)
ロータリーストッパ
【課題】容器6を係合羽根24dに係合させて停止させた際に、後方の容器6からの押し圧によって傷つくことを防止する。
【解決手段】搬送コンベヤ2の3列の搬送レーン2A、2B、2C上を容器6が連続して搬送される。各搬送レーン2A、2B、2Cの側部にそれぞれロータリーストッパ14A、14B、14Cが配置されている。ロータリーストッパ14A、14B、14Cは、フリーな状態で回転するようになっており、この回転を停止させるストッパ機構26が設けられている。回転ホイール24の外周に円周方向等間隔で複数の係合羽根24dが設けられており、前記ストッパ機構26によって回転ホイール24の回転を停止させることにより、係合羽根24dを容器6に係合させて停止させる。さらに、容器6が停止した時にこの容器6の首部6bに係合する第2の係合部材40を設けている。
(もっと読む)
物品の受け渡し装置
【課題】両受け渡し領域において、容器を円滑、かつ確実に受け渡すこと。
【解決手段】回転式のラベラ1の回転体3とロボット15との間に容器2を受け渡す第1受け渡し装置14を備えている。 第1受け渡し装置14は、水平面で循環走行されるタイミングベルト28と、このタイミングベルト28に等間隔で設けた保持手段を備えている。 保持手段はカム部材とカムフォロワとによって移動を案内されるようになっている。そして、各保持手段は、受け渡し領域Eで直線状に移動されてロボット15から容器2を受け取る。他方、受け渡し領域Fでは、容器2を保持した各保持手段が、回転体3の円弧状の移動軌跡に追従して移動して、回転体3側の保持手段31へ容器2を受け渡すようになっている。
(もっと読む)
物品移載装置
【課題】 平坦な側面を有する物品の移載に制限されず、側面に突起体を有する物品の移載を可能とする汎用性の高い物品移載装置の提供にある。
【解決手段】 開閉自在の一対のアーム21、21が機台に対して進退自在に備えられ、物品Wの側面と対向する走行自在の無端帯が前記アーム21、21に備えられ、前記アーム21、21の閉動作により無端帯を介して物品Wを挟持するとともに、前記無端帯の走行により前記物品Wを前記アーム21に沿って進退自在とする物品移載装置であって、前記無端帯には前記物品Wと対向する凸部と凹部37が含まれ、少なくとも前記凸部には前記物品Wと当接する当接面36aが形成されている。
(もっと読む)
1 - 6 / 6
[ Back to top ]