
Fターム[3F077EA04]の内容
船舶の荷積み、荷おろし (441) | 荷役装置の制御;検出、及び荷役方法 (101) | 荷役装置の位置決め制御 (13)
Fターム[3F077EA04]の下位に属するFターム
船体の揺れに対処するもの
船体の傾斜に対処するもの
船体の上下変位に対処するもの (5)
Fターム[3F077EA04]に分類される特許
1 - 8 / 8
セルフアンローダ船のブームコンベア
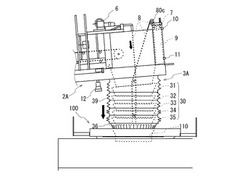
【課題】セルフアンローダ船のブームコンベアについて、粉塵の外部散出やシュートの耐久性低下を伴わずに短周期の上下動をシュート部分で吸収可能とする。
【解決手段】シュート3Aを受入ホッパ100に挿入して積み荷のばら物を連続的に投入しながら陸揚げを行うセルフアンローダ船のブームコンベア2Aにおいて、そのシュート3Aを、伸縮機構で上下に伸縮動作可能としながら上端側が下端側よりも大径の底のない洗面器状とした金属製の節部材31,32,33,34,35を縦方向に連設して上下に伸縮可能な蛇腹状部材を構成してなるインナーシュート30と、弾性樹脂を蛇腹状にしたベローズをインナーシュート30の外周側を隙間無く覆ってなるアウターシュート39の2重構造とし、インナーシュート30内周側で金属製の積み荷投入路を構成しアウターシュート39で樹脂製の粉状物散出防止手段を構成しながら、これらが一体的に伸縮動作を行うものとした。
(もっと読む)
グラブバケット式アンローダのバラ物陸揚げ方法

【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時は、横行方向前方の巻上げロープの巻き込みと横行方向後方の巻上げロープの繰り出しを同期させ、且つ横行方向後方の巻上げロープの繰り出しを遅らせることによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出すことによりグラブバケット53を前方へ振り出させるようにし、バラ物を掴んだグラブバケット53は、前方への振り出しと同時に開放を行ってバラ物をホッパ10内へ投入する。
(もっと読む)
ロープトロリ式アンローダのバケット位置決め方法
【課題】グラブバケットによるバラ物の荷揚げ効率の向上を図る。
【解決手段】トロリ7の第1シーブ20及び第2シーブ23に掛けられて先端がグラブバケット53に固定された第1巻上ロープ19と第2巻上ロープ21の間隔が下方へ向かって減少するよう第1シーブ20と第2シーブ23の間隔が設定してあり、トロリ7の横行時には横行方向後方の巻上げロープを巻き込むことによりグラブバケット53をトロリ7の後方へ傾斜させて吊り下げ、横行を停止する時は、横行方向前方の巻上げロープの巻き込みを停止すると共に、横行方向後方の巻上げロープを繰り出してグラブバケット53をトロリ7が走行して来た方向の前方へ振り出させて槽8'内へ着地させることにより、槽口9直下よりも前後外側奥部のバラ物80を陸揚げ可能にした。
(もっと読む)
荷役用クレーンの走行位置制御装置
【課題】荷役用クレーンの走行位置をコンテナに的確且つ速やかに一致させると共に、手間やコスト増を抑制するる。
【解決手段】走行レール上を走行し、その走行方向に隙間を空けて並べられた複数コンテナ3のうち対象コンテナの中心位置に、走行位置を合わせてコンテナを荷役する荷役用クレーンの走行位置制御装置において、走行方向について荷役用クレーンと同期して移動し、走査角度範囲内16に複数コンテナ3が含まれるように取り付けられ、走査角度ごとにコンテナ表面までの距離を計測する走査型の距離計10を備える。計測された距離とその走査角度18とを関連付けた測定データを記憶する。記憶された複数の測定データに基づいて対象コンテナの中心位置と荷役用クレーンの位置との走行方向に関する相対距離を算出する。相対距離を零に近づけるように荷役用クレーンを走行させる。
(もっと読む)
乾燥ばら積み貨物船を準備する方法
砂の輸送及び流動体化した積み降ろしのために乾燥ばら積み貨物船(1)を準備する方法であって、多目的船倉(4)の内部に、流入開口(12)を有する流動体化パイプ(10)及びまた流動体化した砂のためのスラリー流入口(34)を配置するステップを含んでおり、この方法はさらに、スラリー流入口(34)と積み降ろしパイプ(40)との間に接続されたスラリーポンプ(38)を配置するステップをさらに含み、スラリーポンプが多目的船倉(4)に隣接した船倉(2)に置かれている。  (もっと読む)
(もっと読む)
ロールオン/ロールオフ船舶の荷揚げおよび荷下ろしのための結合ブリッジ
本発明はロールオン/ロールオフ船舶(2)の荷揚げおよび荷下ろしのための通路(1)に関し、少なくとも一端において端部と端部とが接して配置され且つピラー(10,10´,17)上に支持された4つのモジュール(4,12,13,16)を含んでいる。そのモジュールは、少なくとも1つの金属要素(E1〜E3)から成り且つ岸に接続された第1モジュール(4)と、少なくとも2つの並列した金属要素(E2)を含み、第1モジュール(4)よりも大きい幅を有する第2モジュール(12)と、少なくとも2つの並列した金属要素を含み、少なくとも第2モジュール(12)の幅と等しい幅を有する第3モジュールであって、第2モジュール(12)に対する第3モジュール(13)の自由端(130)の上から下への動作を可能にした回動リンクによって第2モジュール(12)に接続された第3モジュール(13)と、第3モジュール(13)に接続された金属要素(7″)から成り、且つロールオン/ロールオフ船舶(2)の係留のために形成された第4モジュール(16)と、を含んでいる。 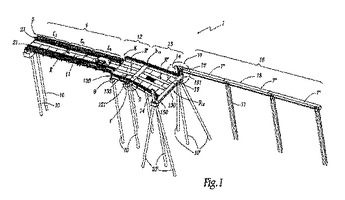 (もっと読む)
(もっと読む)
ブームコンベアの搬出位置調整手段
【課題】ばら物運搬船からセルフアンローディングシステムによりばら物を陸揚げする場合に埠頭に配置した搬入ホッパの中央位置に合わせた船体から突設した陸揚げコンベアの搬出端のずれを調整する。
【解決手段】ブームコンベア7の搬入端71に備えられた搬入ホッパ6との距離を測定するための横方向位置センサー8a,8bと、横方向位置センサー8a,8bからの測定信号により旋回機構9を制御する制御装置10とからなり、陸揚げ作業時において船体が移動して陸揚げコンベア7の排出端71が搬入ホッパ6の中央位置からずれたとき、制御装置10が記横方向位置サンサー8a,8bから送信される測定信号に基づいて旋回機構9を所定の方向へ所定角度だけ駆動させることにより陸揚げコンベア7を旋回させてその排出端71を元の位置に復帰させる。
(もっと読む)
荷役用クレーンの制御装置
【課題】コンテナ等の荷役作業における巻上げ量とスプレッダ等の支持手段の方向とを適切に制御することにより、荷役効率を大幅に向上させることができる荷役用クレーンの制御装置を得る。
【解決手段】船に設置された複数の船体用GPSアンテナ22a及び22bと、船と陸との間で荷物を積み降ろすクレーン5に設けられたクレーン用GPSアンテナ14と、クレーン5に設けられ、荷物を所定の方向から支持する支持手段と、船体用GPSアンテナ及びクレーン用GPSアンテナ14により検出された各位置データに基づいて、荷物の横行時の障害物高さ及び横行される荷物の下面高さを演算し、複数の船体用GPSアンテナ22a及び22bにより検出された各位置データに基づいて、荷物の傾斜を演算する演算手段21とを備え、演算手段21の演算結果に基づいて、クレーン5の巻上げ量及び支持手段の傾斜を制御する。
(もっと読む)
1 - 8 / 8
[ Back to top ]