
Fターム[3J057GA19]の内容
油圧・電磁・流体クラッチ・流体継手 (17,432) | 制御の目的 (2,601) | 省燃費 (230) | ロックアップ (6)
Fターム[3J057GA19]に分類される特許
1 - 6 / 6
動力伝達装置
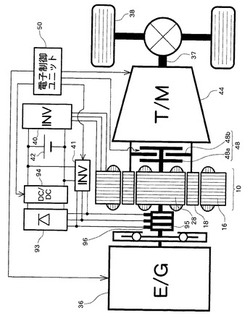
【課題】回転子同士の電磁気結合によるトルクを利用して動力伝達が行われる状態から、係合装置の係合により動力伝達が行われる状態への移行を、駆動トルクの低下を抑えながら円滑に行う。
【解決手段】電子制御ユニット50は、入力側ロータ28と出力側ロータ18との間に作用するトルクによりエンジン36から駆動軸37への動力伝達が行われる状態から、クラッチ48の係合によりエンジン36から駆動軸37への動力伝達が行われる状態に移行する場合に、入力側ロータ28の回転速度が出力側ロータ18の回転速度に近づくようにエンジン36の回転速度を制御しつつ、蓄電装置42からの直流電力をインバータ40で交流に変換してステータ巻線20へ供給することでステータ16と出力側ロータ18との間にトルクを作用させるようにインバータ40で行われる電力変換を制御する。
(もっと読む)
クラッチ装置

【課題】本発明は、クラッチ板の枚数が少ない場合でも簡単な構造で確実に接断動作を行うことができるクラッチ装置を提供することを目的とするものである。
【解決手段】クラッチ装置1は、エンジンの回転駆動軸に連結されたカップリングハウジング2と、カップリングハウジング2に連動するポンプスリーブ6と、ポンプスリーブ6と同軸に配置された出力シャフト9とを備え、ポンプスリーブ6及び出力シャフト9との間を断続して伝達するクラッチとして、接続部10にスプライン結合されたフランジ部材12と、フランジ部材12に固定されたハブ部材14と、ピストン部材15と、フランジ部材12とピストン部材15との間に配置されたクラッチプレート17及びクラッチディスク18を備えている。
(もっと読む)
動力伝達装置
【課題】トルクコンバータを小型化し得るとともに当該トルクコンバータ内のレイアウトの自由度をより向上させることができる動力伝達装置を提供する。
【解決手段】トルク増幅機能を有するトルクコンバータ1と、車両の前進時に作動可能とされるとともに、トルクコンバータ1の駆動伝達系を介してエンジンの駆動力を駆動輪に伝達させる第1クラッチ手段3a、及びトルクコンバータ1の駆動伝達系を介さずエンジンの駆動力を駆動輪に伝達させる第2クラッチ手段3bを有するクラッチ手段3と、車両の状態に応じて第1クラッチ手段3a又は第2クラッチ手段3bを任意選択的に作動させ得る選択手段4とを備えるとともに、エンジンEとトルクコンバータ1との間における動力伝達系の途中にトルク変動を減衰し得るダンパ機構7を有して成るものである。
(もっと読む)
摩擦締結要素の締結力制御装置
【課題】スリップ零用のフィードバック制御中、回転検出誤差があっても、クラッチ締結圧が制御最大値になることがないようにし、再開スリップ制御応答を向上させる。
【解決手段】クラッチ温度TEMPcfがスリップ制御禁止温度TEMP1以上になるt1と、TEMPcfがスリップ制御許可温度TEMP2以下になるt4との間、過熱防止のため、クラッチの締結圧tΔPをスリップ回転(ΔN)が零となるようフィードバック制御する。tΔPが回転検出誤差に起因してスリップ回転零用必要最小締結圧ΔPlimtを越えようとする時(t2)以後、このΔPlimtを越えることのないよう上昇制限する。よって、t4でのスリップ制御の再開に際して行うべきtΔPの低下が、制御最大値ΔPmaxよりも低いΔPlimtからの低下となり、スリップ制御の応答遅れをΔT2だけ改善することができる。
(もっと読む)
車両用駆動装置
【課題】エンジンから駆動輪への動力伝達経路に設けられたクラッチと、クラッチから駆動輪への動力伝達経路に設けられて回生制動力を発生可能な電動機とを備えた車両用駆動装置において、電動機の回生時にクラッチのスリップ状態を適切に制御して燃費を向上する。
【解決手段】第2モータジェネレータMG2の回生時にエンジン回転速度NEが所定の回転速度NE’となるようにスリップ制御手段122によりクラッチK(例えば第1クラッチC1)のスリップ状態が制御されるので、クラッチKが完全係合されている場合に比較してクラッチKより上流の負荷例えばエンジン12の回転抵抗が抑制されて、第2モータジェネレータMG2の回生量を多くとることが可能になる。よって、燃費が向上する。また、エンジン回転速度NEが所定の回転速度NE’に維持されることから、車両再加速時のエンジントルクTEの立ち上がりの鈍化が抑制される。
(もっと読む)
渦電流ドライブによる二段速度回転制御装置
回転制御装置(10)は第1および第2の回転可能アセンブリ(20、96)を含む。第1のアセンブリは第1の支持マウント(12)に回転可能に取り付けられ、第2のアセンブリは第1のアセンブリに対して回転可能かつ軸方向に可動である。第1および第2のアセンブリは、同軸の表面(28、106A)を有し、また第2のアセンブリが第1の軸方向位置にあるときには相互に摩擦により係合し、第2のアセンブリが第2の軸方向位置にあるときには係合を解く、軸方向表面(46、102)を有する。第2のアセンブリは、第2の軸方向位置にあるときには、第1のアセンブリから独立に回転できる。回転制御装置は、第1および第2のアセンブリの同軸の表面とそれぞれ関連する第1および第2の渦電流結合アセンブリ(134、136)を備える渦電流ドライブ(132)を含み、これらの渦電流結合アセンブリは空気の隙間(114)を介して隣り合って位置する。 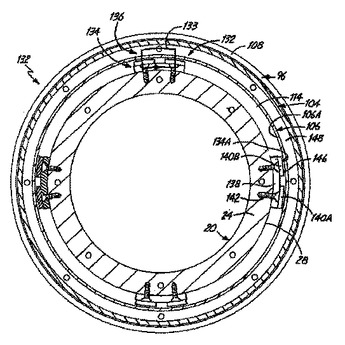 (もっと読む)
(もっと読む)
1 - 6 / 6
[ Back to top ]