
Fターム[3J058CA15]の内容
ブレーキ装置 (43,364) | 制動部材 (2,167) | シュー(主にドラムブレーキ) (500) | 支持 (231) | ホールドダウン装置 (36) | カップ (2)
Fターム[3J058CA15]に分類される特許
1 - 2 / 2
シューホールドダウン装置
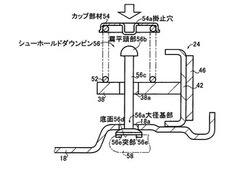
【課題】シューホールドダウンピンの扁平頭部をカップ部材の掛止穴に能率よく容易に挿通させるシューホールドダウン装置を提供する。
【解決手段】シューホールドダウンピン56の大径基部56aの底面56dには、シューホールドダウンピン56の扁平頭部56bの扁平方向に関連する形状で突き出された突部56eが備えられているため、作業者がシューホールドダウンピン56の大径基部56aの底面56dに備えられた突部56eを触ることによって扁平頭部56bを見なくてもシューホールドダウンピン56の扁平頭部56bの扁平方向が分かるので、カップ部材54の掛止穴54aにシューホールドダウンピン56の扁平頭部56bを能率よく容易に挿通させることができる。
(もっと読む)
4自由度拘束ブレーキ装置及びパラレルリンク型ロボット

【課題】4自由度を拘束できるブレーキ装置を得る。該ブレーキ装置を用いブレーキ装置の数が少ないパラレルリンク型ロボットを得る。
【解決手段】拘束対象部材1を球状の中間部材2の中心穴に貫通させる。中間部材2は複数(3つ)に分割されている。中間部材2の外周には、ブレーキ動作部3a、3bが配設されている。磁気コア4a、4bに電流が流れると、ブレーキ動作部3a、3bは中間部材2から離れる(図4(a)参照)。拘束対象部材1も回転、軸方向への移動ができる。電流が絶たれた状態では、バネ7により、ブレーキ動作部3a、3bが中間部材2を圧接し、中間部材2が拘束対象部材1を圧接し、拘束対象部材1は任意の方向への揺動と、軸方向への移動及び軸中心線回りの回転の4自由度が拘束される(図4(b)参照)。パラレルリンクン型ロボットにこのブレーキ装置を用いることで、ブレーキ装置数を減らす。
(もっと読む)
1 - 2 / 2
[ Back to top ]