
Fターム[4E065CB01]の内容
スポット溶接 (796) | 溶接機の移動・位置決め (33) | 移動又は回転 (20)
Fターム[4E065CB01]の下位に属するFターム
Fターム[4E065CB01]に分類される特許
1 - 12 / 12
スポット溶接法
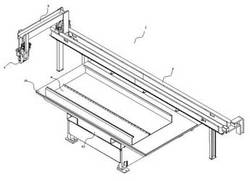
【課題】この発明は巨大な被溶接物を、長い板状基台上に載置して、被溶接物の縦面にある多数のスポット溶接個所を作業者は押しボタンの操作で容易に連続的に作業効率良く溶接できるスポット溶接法を提案する。
【解決手段】被溶接物を載置する板状基台と、折り曲げ形状の大きな被溶接物二体の合わせ部の縦面を溶接するガン本体部と、ガン本体部を支持するガンフレーム部と、ガン本体部とガンフレーム部を横移動させるガン走行部により構成して、ケーブルでの電気配線をなくし、更に駆動モータとラックを配置して、作業者はボタンの操作により、自動でガン本体部を移動できることを可能としている。
(もっと読む)
スポット溶接機

【課題】この発明は平坦な板状電極の上に立設した溶接ガンを具備したスポット溶接機に関するもので、平面部並びに縦面に、多くの溶接個所を持つ被溶接物でも、移動反転を必要とせずに、縦面の多くの溶接個所はZ方向の溶接ガンで、平面部は他の溶接ガンで、操作性良く、かつ作業効率も良好なスポット溶接機を提案する。
【解決手段】被溶接物(W)を載置した平坦な板状電極(30)の上に立設された溶接ガン(2,3)は平面部のスポット溶接を行い、縦面の溶接個所はZ方向溶接ガン(31)で行う。Z方向溶接ガン(31)はZ方向ガン本体部(4)と、ガンフレーム部(5)と、板状電極(30)の端部に配置したガン走行部(6)とで構成し、横方向への移動を自動走行とし、Z方向ガン本体部(4)で被溶接物(W)を挟持し、加圧通電して縦面のスポット溶接を連続的に実施するよう構成したスポット溶接機とする。
(もっと読む)
ポータブルガン
【課題】作業者の作業性を向上できるポータブルガンを提供する。
【解決手段】スポット溶接に用いるポータブルガン10であって、給電装置60は、高電流を生成するトランス65と、トランス65に接続される1次ケーブル21と、ポータブルガン本体20に接続される2次ケーブル22と、1次ケーブル21と2次ケーブル22とを接続する接続部30と、を具備し、接続部30は、1次ケーブル21に接続される1次側ブラケット31と、2次ケーブル22に接続される2次側ブラケット32と、を具備し、コントローラ50は、給電装置60によるポータブルガン本体20への通電時には、1次側ブラケット31と2次側ブラケット32とを面圧し、給電装置60によるポータブルガン本体20への通電時以外には、1次側ブラケット31と2次側ブラケット32との面圧を解除する。
(もっと読む)
抵抗溶接方法、抵抗溶接用電極及びキャップ構造
【課題】溶接ムラを防止し、溶接不良が生じ難い抵抗溶接方法、抵抗溶接用電極及びキャップ構造を提供する。
【解決手段】抵抗溶接方法は、ステージ5の凹部51に半導体素子41を搭載したステム4をセットする。一方、キャップ3の頭部31にワッシャ2を装着する。次いで、ワッシャ2から突出する頭部31を電極1の穴14に挿入し、電極1の先端面13をワッシャ2の上面と接触させた状態で、電極片11の外側からクランプして、電極1でキャップ3を把持する。次に、電極1を移動し、穴14から露出するキャップ3のフランジ部35をステム4に当接させた状態で調芯を行い、フランジ部35をステム4に位置合わせする。そして、電極1の先端面13とフランジ部35との間にワッシャ2を介在させた状態で、電極1からワッシャ2、フランジ部35、ステム4、ステージ5に電流を流して、キャップ3とステム4とを溶接する。
(もっと読む)
溶接ワーク位置検出方法
【課題】スポット溶接システムにおいて、可動電極による溶接ワークの表面位置の検出精度を向上させる。
【解決手段】サーボモータ34によって駆動される可動電極30とこれと対向して配置される対向電極32とを有するスポット溶接ガン14と、溶接ワークWとスポット溶接ガンの一方を保持する多関節ロボット12とを備えるスポット溶接システムにおいて、可動電極30と溶接ワークWとを接近させるように相対移動させて、相対移動中に可動電極30の移動速度及び加速度の少なくとも一方を監視し、可動電極30の移動速度又は加速度が変化したときに、可動電極が溶接ワークWに接触したと判断して、このときの可動電極30の位置と多関節ロボット12の位置とから溶接ワークWの可動電極側表面の位置を検出する。
(もっと読む)
溶接ガン
【課題】この発明は平坦な板状電極の上で溶接ガンを縦向き姿勢で上下に昇降させて金属材などから成る被溶接物をはさみ加圧通電して溶接でき、溶接打点が箱型などの被溶接物の内部や隅部にあっても、溶接ガンを回転させつつ連続的に通電して溶接できる溶接ガンを提案する。
【解決手段】平坦な板状電極(1)上で軸線を中心として回転するガン本体(200)と、このガン本体(200)の上端面に当接して溶接ガンに通電し加圧する加圧通電体(300)とから成って、この加圧通電体とガン本体とに共通させて、それぞれ軸心を通る直線状の冷却水通路(400)、(500)を形成し、これら冷却水通路の間に冷却水通路は冷却水溜め(600)を介在させて成るものである。
(もっと読む)
電気抵抗スポット溶接機
【課題】複数の電極を自動的に切り替えて使用することができる電気抵抗スポット溶接機を提供する。
【解決手段】第1及び第2の電極ホルダーはいずれもその外周に複数の電極10が一定角度をおいて取り付けられたものとして、両電極ホルダーのいずれかの電極が溶接位置で対向して停止されるように回転手段47によって所定角度ずつ間欠的に回転可能なものとされており、回転手段47により前記第1の電極ホルダー及び前記第2の電極ホルダーの少なくとも一方を回転させることにより、前記第1及び第2の電極ホルダーに取り付けられた任意の電極を選択して対向させて、これらの電極に被溶接物を挟んで、被溶接物を溶接するように構成する。回転手段47は第1の電極ホルダーを回転させ、電極ホルダーの回転力の伝達する第1のピニオンギア49と、第2の電極ホルダーを回転させる第2のピニオンギア69と、これら第1のピニオンギア49及び第2のピニオンギア69と係合し、離接自在に配設されたラックギア80を配設する。
(もっと読む)
自動スポット溶接方法
【課題】この発明は板状電極上で門型枠により溶接ガンを縦、横移動させ、この移動を電子計算制御機器の位置制御ユニットにより追跡制御しつつ位置決めし、溶接操作ユニットにより溶接条件に応じたプログラムに従って溶接打点を加圧通電して溶接打点を溶接する方法を提案する。
【解決手段】下部電極として働く板状電極110で、電子計算制御機器200からの指令によって上部電極として働く溶接ガン130を昇降自在に搭載する門型枠120をこの板状電極110の縦軸方向に縦移動させ、溶接ガン130を門型枠120上で板状電極110の縦軸方向に直交する横軸方向に横移動させ、溶接ガン130を軸芯の周りに回転移動させて板状電極110上で所望の溶接打点上に溶接ガン130を人手によらずに位置決めし、続いて溶接ガン130を下降させてこの溶接打点を加圧し、このようにして溶接打点を順次にスポット溶接する。
(もっと読む)
回転可能なスポット溶接機
【課題】装置の省スペース化を図ることができる、数万アンペアの大電流が必要なスポット溶接機を提供する。
【解決手段】
支持部材2に回転軸4が固定部材3,3’により固設され,当該回転軸の上部にスポット溶接機の電源・制御部分6を戴置する第1の載置台5が固設され,当該回転軸の下部に第2の載置台7が固設され,当該第1の載置台の下部及び当該第2の載置台の上部にコの字型に給電バー8が設置され,当該第1の載置台の下部の給電バーの先端部分にアーム9が設けられ,当該アームの上部に加圧機構10が設けられ,当該アームの先端部分にチップホルダー11が設けられ,当該チップホルダーの先端部にチップ12が設けられ,当該第2の載置台の上部に設置された給電バーの先端部分にチップホルダー11’が設けられ,当該チップホルダーの先端部にチップ12’が設けられている。
(もっと読む)
自動スポット溶接方法
【課題】全面にわたって下部電極として働く板状のテ−ブル電極の上に被溶接材をのせて上部電極の溶接ガンを3次元方向に人手によらずに移動させて自動的に溶接打点を溶接する方法を提案する。
【解決手段】表面のいずれのところも下部電極として働く板状の電極、つまりテ−ブル電極110の上に被溶接材Wをおき、この被溶接材Wの各溶接打点のところに所定のプログラムに基づいてコンピュ−タなどの電子制御機構200からの指令によって溶接ガン130を下部電極として働かせながらテ−ブル電極110を幅方向にまたぐ門型枠120を介在させて3次元方向に移動、昇降、加圧させて溶接打点を順次にスポット溶接するスポット溶接法である。
(もっと読む)
自動スポット溶接機
【課題】この発明は小ロッドの金属板加工の分野において用いられているスポット溶接における溶接作業そのものを自動化、ロボット化することができるスポット溶接機を提供する。
【解決手段】平坦な導電材からなって下部電極として働くテ−ブル電極110と、このテ−ブル電極110の上に略々水平に設けた門型枠体120とを具え、この門型枠体120にテ−ブル電極110との間で被溶接材をはさんで上部電極として抵抗溶接する溶接ガン130を縦向き姿勢に維持して高さ方向に移動自在に設ける一方、この溶接ガン130には、少なくとも下端を旋回させる旋回装置140を設けて、さらに、門型枠体120をテ−ブル電極110に沿ってその長さ方向に移動自在に構成すると共に、テ−ブル電極110の幅方向に移動自在に構成する。
(もっと読む)
溶接教示位置補正システム及びキャリブレーション方法
【課題】教示プログラムを、作業者が手動で事前に修正することなく、簡便に、精度良く補正する。
【解決手段】溶接教示位置補正システム1は、ロボット2と、対向配置された二つの溶接チップ31,32を有するスポット溶接ガン3と、一方の溶接チップ31に交換可能に設けられるとともに、光軸が溶接チップ32の軸と同軸となるように設けられ、溶接チップ32によるワークの打点部を撮像する撮像装置4と、ロボット2及びスポット溶接ガン3の動作制御を行う動作制御手段5と、撮像装置4により撮像された撮像画像の画像処理を行って、撮像画像中における打点部の位置情報を取得する画像処理手段6と、撮像画像中におけるワークの打点部の位置情報に基づいて、教示プログラム53aにおけるロボット2の教示位置を複数の方向に補正するプログラム補正手段5と、を備える。
(もっと読む)
1 - 12 / 12
[ Back to top ]