
Fターム[4F210AP08]の内容
プラスチック等の延伸成形、応力解放成形 (31,869) | 検出量又は監視量 (116) | 速度 (7) | 回転速度(←回転数) (4)
Fターム[4F210AP08]に分類される特許
1 - 4 / 4
延伸装置のクリップチェーン走行速度の制御方法
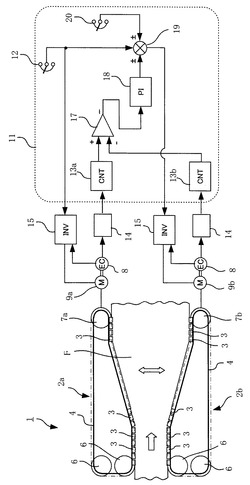
【課題】安価な装置によって、一対のクリップチェーンの走行速度を精度良く一致させることができるクリップチェーンの走行速度の制御方法を提供する。
【解決手段】延伸装置のクリップ装置1において、第1、2のクリップチェーン2a、2bを、エンコーダ8付の第1、2の駆動モータ9a、9bによって駆動される第1、2の駆動スプロケット7a、7bによって走行させる。エンコーダの出力パルスをカウントして第1、2のカウント値(Lp、Rp)を得、これらは第1、2の駆動スプロケットが1周する毎に0にリセットするようにする。そうすると、第1、2のカウント値(Lp、Rp)は第1、2の駆動スプロケットの回転角度を表すことになる。第1、2のカウント値(Lp、Rp)の偏差を求め、偏差が無くなるように第2の駆動モータの回転速度を補正する。
(もっと読む)
延伸装置の制御方法

【課題】延伸装置において、手動介入後の自動運転復帰で、各セクションの速度到達時刻がバラツキ、製品の延伸率にバラツキがでるため、製品むらが大きくなっていた。
【解決手段】延伸装置において、複数の延伸ロールは各々が増減速機を介して電動機によって駆動され、前記各電動機は駆動電流を検出する電流検出器と回転速度を検出する回転速度検出器を備え、前記電流検出器および前記回転速度検出器の検出信号はそれぞれ前記各電動機の駆動制御を行う駆動制御器に入力され、前記駆動制御器には延伸制御器から各延伸ロールの回転速度制御信号が入力されており、前記駆動制御器は前記回転速度制御信号に基づいて電動機の回転制御を行い、手動介入後の自動運転復帰時には、各延伸ロールの回転速度および加減速度は再計算され、設定速度到達時間の最も遅いものの設定速度到達時刻に、各延伸ロールが同時に設定速度に達するように設定されていることを特徴とする。
(もっと読む)
光学フィルムの製造方法
【課題】光学フィルムの光学特性の均一性を向上させる
【解決手段】溶液製膜設備11は、流延室21と、テンタ部22とを備える。流延室21には、ドープ12を吐出する流延ダイ30と、周面31aにドープ12が流延される流延ドラム31と、エンコーダ33が備えられる。流延ドラム31には駆動装置34が接続され、駆動装置34にはコントローラ35が接続される。流延ドラム31から剥ぎ取られた流延膜13が湿潤フィルム14となってテンタ部22に搬送される。テンタ部22は、湿潤フィルム14の両側端部を保持し、駆動装置40の駆動により湿潤フィルム14を延伸搬送する。コントローラ35は、エンコーダ33の信号により検出された流延ドラム31の回転速度の変動に対応させるように駆動装置40のモータを駆動させる。
(もっと読む)
横延伸システム
【課題】ポテンショメータやリミットスイッチが不要であり、レール支持部材の移動中に屈曲角が許容角度幅に達してしまうことがない横延伸システムを提供する。
【解決手段】シャフト(Si)をサーボモータ(Mi)で駆動し、エンコーダ(Gi)からのフィードバック信号(pi)により現在幅wiを求める。フィードバック信号(pi)に基づいて求めた現在幅wiが適正か否かを判定して、適正でないならサーボモータ(Mi)を停止させる。現在幅wiと目標幅Wiの差Xiが多いシャフトでは高い回転速度とし、少ないシャフトでは低い回転速度とする。
【効果】ポテンショメータやリミットスイッチを備える必要がなくなり、メンテナンス性が向上する。レール支持部材(Pai,Pbi)の移動中の屈曲角が小さく保たれ、許容角度幅に対する余裕が大きくなる。
(もっと読む)
1 - 4 / 4
[ Back to top ]