
Fターム[5B057AA16]の内容
Fターム[5B057AA16]に分類される特許
1,801 - 1,820 / 2,648
車両用周辺情報提示装置及び車両用周辺情報提示方法
【課題】表示装置に表示された映像のどの領域が目視できない領域であるのかを運転者が瞬時に確認可能にする。
【解決手段】周辺有効視野範囲設定部6が、車両1周辺に対する運転者Mの有効視野範囲を周辺有効視野範囲として設定し、画質変換部8が、周辺画像撮像部3により撮像された映像領域のうち、周辺有効視野範囲に対応する映像領域の画質を他の映像領域の画質に対して変化させる。これにより、運転者の周辺有効視野範囲に対応する映像領域と運転者が目視できない領域に対応する映像領域とでは画質が異なるようになるので、運転者は画質の違いから表示部5に表示された映像のどの領域が目視できない領域であるのかを瞬時に確認することができる。
(もっと読む)
車両周辺監視装置

【課題】車両周辺に所在する対象物の種別を精度良く認識することができる車両周辺監視装置を提供する。
【解決手段】赤外線カメラの撮像画像から、対象物の頭部の可能性がある第1の画像部分HP_1を抽出して、HP_1を含む基準マスク領域MASK_Cと、基準マスク領域MASK_Cの左側近傍の左方マスク領域MASK_Lと、該基準マスク領域MASK_Cの右側近傍の右方マスク領域MASK_Rとを設定する手段と、基準マスク領域MASK_Cの平均輝度AVE_Cと、左方マスク領域MASK_Lの平均輝度AVE_Lとの差、又は該AVE_Cと右方マスク領域MASK_Rの平均輝度AVE_Rとの差が、所定レベル以下であるときに、下方検索領域AREA_3内で脚部の画像と推定される第2の画像部分を検索し、該第2の画像部分が複数検出されたときには、対象物の種別は歩行者であると認識する手段とを備える。
(もっと読む)
車両用道路区画線認識装置、及び、車両用制御装置
【課題】車両から撮像した画像における道路区画線の位置を適切に認識することが可能な車両用道路区画線認識装置、及びこれを利用した車両用制御装置を提供すること。
【解決手段】車両前方の道路に関する情報を取得する道路情報取得手段と、車両前方を撮像する撮像手段と、道路情報取得手段により取得された情報に基づいて仮想道路区画線を作成する仮想道路区画線作成手段と、を備え、仮想道路区画線作成手段により作成された仮想道路区画線に基づく初期設定を用いて撮像手段の撮像画像を解析することにより、撮像手段の撮像画像における道路区画線の位置を認識することを特徴とする、車両用道路区画線認識装置。
(もっと読む)
周囲障害物検出装置
【課題】障害物回避等の制御を行う時間的余裕をつくりだすことができる周囲障害物検出装置を提供すること。
【解決手段】周囲障害物検出装置は、距離に対する光束密度の変化特性が異なる2つの光束からなる照射光を生成する照射光生成手段Bと、照射光生成手段Bの制御をして前記照射光の生成制御を行う点灯制御手段2と、周囲物体に投影された前記照射光を撮像する撮像手段(カメラ6)を備えている。また、周囲障害物検出装置は、撮像した画像から定常光を除去する定常光除去手段(投影光抽出手段7)と、撮像画像での片方の照射光強度から反射光の有無を判断する反射光有無判断手段12と、撮像画像での2つの光束に対応する画素値の比を算出する演算手段11と、算出した比の値から物体までの距離に換算する距離換算手段13を備えている。
(もっと読む)
駐車支援装置
【課題】より高精度に駐車空間を検出する。
【解決手段】処理ユニット5において、スリット光を照射する発光部2から車両10の側方部にスリット光を照射させると共に、車両10に搭載されたカメラ1で撮影された車両側方部の画像を入力し、この画像の中から撮影されたスリット光が屈曲する屈曲点を検出して、この屈曲点に基づいて車両周辺物体と車両10との距離を算出する。そして、この距離に基づいて車両の側方部に駐車空間を抽出し、ドライバに対して駐車支援と行う。
(もっと読む)
機器制御システムおよび機器制御方法
【課題】住宅、または自動車内に設けられた電子機器または家庭用電化製品など各機器について、専用のセンサ類に頼ることなく、ユーザの好みに応じて、各機器の動作制御の内容を設定または変更を容易にできる機器制御システムおよび機器の動作の機器制御方法を提供する。
【解決手段】本発明の機器制御システムは、機器に設けられ、所定の空間領域を撮影し、撮影画像データを得るカメラと、撮影画像データを解析し、比較対象画像データを作成する撮影画像解析部と、比較対象画像データと比較される参照画像データ、ならびに比較対象画像データと参照画像データとの類似度に基づく機器の動作条件、および機器の動作内容が登録される登録部と、類似度を算出する比較部と、類似度の結果に応じて、動作内容に基づく制御信号を機器に出力し、動作内容の動作を機器に実行させる指示部とを有する。
(もっと読む)
物体候補領域検出装置、物体候補領域検出方法、歩行者認識装置、および車両制御装置
【課題】車載カメラの画像から高精度に物体が存在する可能性がある領域を検出すること。
【解決手段】基準パターンデータベース15が、周辺の環境別に複数の基準パターンを記憶し、シーン判定部12がナビゲーション装置30、カメラ31、照度センサ32、タイマ33、ライトスイッチ34、ワイパースイッチ35、雨滴センサ36、外部通信装置37、VICS受信装置38の出力を用いて自車両周辺の環境を判定する。基準パターン選択部14は、シーン判定部12の判定結果を用いて環境に対応する基準パターンを選択する。
(もっと読む)
物体候補領域検出装置、物体候補領域検出方法、歩行者認識装置および車両制御装置
【課題】車載カメラの画像から高精度に物体が存在する可能性がある領域を検出すること。
【解決手段】カメラ31が撮影し、前処理部11による処理が施された入力画像から歩行者候補領域検出部19が歩行者候補領域を検出し、歩行者認識部18が歩行者認識を行なうとともに、学習処理部12が入力画像のうち歩行者の存在しない領域から基準パターンを作成して基準パターンデータベース15を更新し、次回の歩行者候補領域の検出に使用する。
(もっと読む)
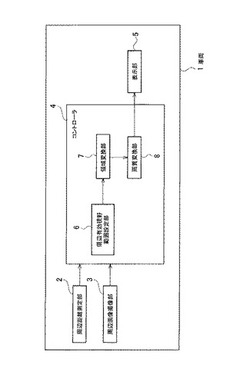
右折感応制御システム、及び右折感応制御方法
【課題】交差点内の状況が把握できずに、制御システムが大規模とならず、安価に右折待ち車両の渋滞を抑制できる右折感応制御システム及び右折感応制御方法を提供する。
【解決手段】カメラ7−1で交差点13−1内の右折待ち車両が停止する領域を右折車両感知エリア14A−1〜14D−1に設定し、カメラ7−1で、各エリアを撮影し、右折車両検知装置5−1で右折待ち車両の台数を検知する。そして、信号制御装置6−1は、この右折待ち車両の台数に応じて信号制御パラメータを一時的に変更して、右折矢印の表示時間や黄信号や赤色信号灯の表示時間を延長・短縮する。これにより、交差点内にいる右折待ち車両が多い場合でも、右折待ち車両をすべて交差点外へ進行させることができ、右折待ち車両による渋滞の発生を抑制できる。また、右折待ち車両がほとんどいない場合には、右折矢印の表示時間を短縮可能なので、無駄な右折矢印点灯時間を減少できる。
(もっと読む)
車両用監視装置
【課題】表示された映像中の注意すべき対象の見落としを防止することができる車両用監視装置。
【解決手段】センサ5で車両周囲の一または複数の対象物に関する情報を収集し、その収集した情報に基づいて対象物に対する注意レベルを検出部8で算出する。映像処理部7では、車両周囲の映像の所定領域に対する誘目性を算出し、その誘目性と検出部8で算出された注意レベルとに基づいて映像を加工処理する。加工処理された映像は、モニタ2に表示される。その結果、注意すべき対象であるにもかかわらず運転者の注意が向いていない場合には、その対象の映像が強調表示され、運転者の見落としを防止することができる。
(もっと読む)
車両周辺監視装置、車両周辺監視システム、および車両周辺監視方法
【課題】ドライバの死角となる場所を撮影して表示するに際し、ドライバが死角となる場所を容易に認識できる表示を行う。
【解決手段】画像処理装置30が、カメラ10で撮影された車両周辺の画像の画像データを入力し、入力した画像データを、車両の運転席(ドライバ)の視点から車両の車室内に備えられたモニタ40側を見た視点にアフィン変換すると共に、アフィン変換した画像をモニタ40に表示させる。
(もっと読む)
色識別装置のホワイトバランス調整装置
【課題】太陽の色温度が変化しても、車両の色を正確に撮影する。
【解決手段】電子カラーカメラ1に備えた、4方向のフォトダイオード2f、2b、2r、2lの大きさから、順光・逆光・曇りを判定機構10により判定し、また現在の日付・時刻で夕焼け・朝焼けが発生するかどうかを判定機構15により判定し、判定機構10と,15の判定結果より、「朝焼け順光または夕焼け順光」、「曇りまたは日中逆光」「その他」を判定機構16により判定し、「朝焼け順光または夕焼け順光」の時には、赤味除去フィルタ23を電子カラーカメラ1の入射端面に装着し、「曇りまたは日中逆光」の時には青味除去フィルタを電子カラーカメラ1の入射端面に装着し、「その他」の時にはフィルタ装着をしない。
(もっと読む)
物体候補領域検出装置、物体候補領域検出方法、歩行者認識装置および車両制御装置
【課題】車載カメラの画像から高精度に物体が存在する可能性がある領域を検出すること。
【解決手段】基準パターンデータベース15は、画像の背景ごとに異なる(空用、道路用、道路外用などの)複数の基準パターンを記憶する。背景領域分割部12は、消失点や車線認識を用いて入力画像の背景を分割する。基準パターン選択部14は、判定領域を背景領域のいずれから切り出したかによって、歩行者候補領域検出部19が使用する基準パターンを選択する。
(もっと読む)
画像処理システム及び画像処理方法
【課題】画像の解像度を高く保ったまま、視点変換した変換画像と原画像とを同時に表示装置に表示させる。
【解決手段】第1乃至第4の撮影装置1a〜1dが画像撮影部5で撮影した通常ビュー画像を視点変換部8にて視点変換してトップビュー画像を生成し、これら通常ビュー画像とトップビュー画像との双方を画像処理装置2に出力する。また、画像処理装置2は、各撮影装置1a〜1dから出力されたトップビュー画像を合成して全周囲画像を生成し、表示装置3には全周囲画像といずれかの撮影装置からの通常ビュー画像とを同時に表示させる。
(もっと読む)
車両周辺監視装置
【課題】不要な注意喚起や煩わしい注意喚起がなされることを抑制して、車両の運転者に信頼性の高い注意喚起を行う車両周辺監視装置を提供する。
【解決手段】車両10に搭載された撮像手段2R,2L,2´によって得られる画像から、車両の周辺に存在する物体を検出する車両周辺監視装置であって、画像における車道領域を識別する(STEP100)車道領域識別手段と、画像から対象物を抽出する(STEP200)対象物抽出手段と、運転者に対して注意喚起を行う注意喚起手段6,7と、対象物抽出手段によって、車道領域内で対象物が抽出された場合には、第1の注意喚起を前記注意喚起手段により出力し、車道領域外で対象物が抽出された場合には、第1の注意喚起と異なる第2の注意喚起を注意喚起手段により出力する(STEP500)注意喚起制御手段とを備える。
(もっと読む)
画像処理装置
【課題】車載の比較的安価な撮像手段で撮像された画像中からオブジェクトの特定の属性を的確に抽出し識別することが可能な画像処理装置を提供する。
【解決手段】画像処理装置1は、自車両前方の風景を撮像する撮像手段21と、撮像された画像It中から特定のオブジェクトを含む画像領域rtを抽出するオブジェクト抽出部3と、オブジェクトの特定の属性を投票する複数の自己組織化マップSOMを備える並列処理部5と、投票結果Vを統合してオブジェクトの特定の属性Aを識別する統合部6とを備え、並列処理部5は複数の自己組織化マップSOMにそれぞれ1つずつ対応させた画像フィルタFから生成されたベクトルxkを自己組織化マップSOMに入力し、それぞれ勝者ユニットucを決定し、各勝者ユニットucが属するクラスCf、Cbに対応付けられたオブジェクトの特定の属性を投票結果Vとして出力させる。
(もっと読む)
駐車支援プログラム、駐車支援装置、駐車支援画面
【課題】運転者が駐車操作時の状況を把握しやすい画像を表示する駐車支援プログラム、駐車支援装置、駐車支援画面を提供する。
【解決手段】自車の環境を撮影して撮影画像を取得すると共に、自車位置を検出して撮影位置とし、撮影画像と撮影位置とを対応づけて記憶する撮影ステップと、撮影ステップにより記憶された撮影画像と撮影位置と所定の視点とに基づいて、該視点から見た環境の画像である環境画像を生成すると共に、自車位置を検出し、該自車位置と予め記憶された自車の形状情報と視点とに基づいて、該視点から見た自車の画像である自車画像を生成し、環境画像と自車画像とを合成した画像である合成画像を生成する画像生成ステップと、画像生成ステップにより生成された合成画像を表示する表示ステップとをコンピュータに実行させる。
(もっと読む)
車両周囲状況確認装置
【課題】部分的に輝度レベルの大きく異なる周囲映像信号を補正して視認性のより周囲画像を生成する車両周囲状況確認装置を提供する。
【解決手段】車両(V)に設置された撮像装置(C)により撮影された画像(I)を提示する車両周囲状況確認装置(100)において、画像取得部(2)は画像(I;Sv)を受け取り、選択部(4、8、Si2)は車両(V)の進行方向に基づいて取得部(2)が受け取った画像の部分領域(Ir)を選択し、補正部(6)は選択部(2、8、Sc)が選択した部分領域(Ir)を補正する。
(もっと読む)
画像合成装置
【課題】特定のカメラの状態に画面全体が影響されることなく、また特定のカメラの異常な状態が他のカメラに影響することなく、カメラ間の輝度、色バランスの差を軽減することができる画像合成装置を提供すること。
【解決手段】複数のカメラ2を隣接するカメラ同士の撮像範囲の一部が重複する重複部ができるように配置し、重複部の画像レベルを画像レベル計測部131で計測し、補正値算出手順決定部132が、各重複部における隣接カメラ間の信号レベル比によりゲインの補正値を算出する手順を定めた補正値算出手順を決定し、補正仮ゲイン算出部133が補正値算出手順に従って重複部でのレベル差を補正するための各カメラ2の仮ゲインを算出し、補正ゲイン規格化部134が全カメラのゲインを一倍に規格化し、補正ゲイン決定部135が規格化されたゲインと現在のゲインとの比較で最終ゲインを決定し、画像補正部14が最終ゲインに基づいて画像を補正する。
(もっと読む)
走路境界検出装置および走路境界検出方法
【課題】撮像手段で撮像した自車両前方の画像を画像処理して抽出した特徴点を表す各画素の画像上における速度情報および配置に基づいて、高い精度で走路境界を検出する走路境界検出装置および走路境界検出方法を提案する。
【解決手段】撮像部101で撮像した自車両前方の画像から特徴点を抽出する特徴点抽出部103と、特徴点を表す画素の画像上の移動速度を算出する移動速度算出部104と、移動速度を指標として画素をグループ化するグループ化部105と、グループ内の上端と下端に位置する画素の座標を所定の範囲の俯瞰座標における座標に変換する座標変換部106と、変換後の画素の座標に基づいて特徴点を平面物または立体物と判定する物体属性判定部107と、下端点の画像上における配置に基づいて走路境界であるか否かを判定する走路境界判定部108とを有する制御部100を備える。
(もっと読む)
1,801 - 1,820 / 2,648
[ Back to top ]