
Fターム[5B057CH09]の内容
画像処理 (340,757) | 処理部 処理装置、処理システム (15,018) | 演算器 (6,373) | 特定演算 (2,091) | フィルタリング、積和演算 (1,281)
Fターム[5B057CH09]に分類される特許
201 - 220 / 1,281
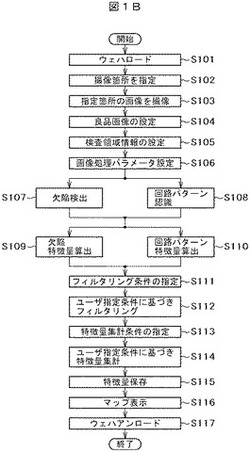
検査方法およびその装置
【課題】
半導体製造プロセスにおいて,パターン微細化に伴い,致命となる欠陥サイズも微小化しており,微細な欠陥を検出するために欠陥検査装置の感度を上げると,本来は欠陥ではない製造公差などを検出してしまい,欠陥の発生傾向を捕らえることが困難となる。
【解決手段】
被検査対象を検査する方法において,被検査対象の指定箇所について画像撮像手段を用いて撮像し,撮像した画像から欠陥を検出し,撮像した画像から回路パターンを認識し,検出した欠陥から画像濃淡および形状に関する特徴量を算出し,認識した回路パターンから画像濃淡および形状に関する特徴量を算出し,検出した欠陥と認識した回路パターンの中から特定の欠陥又は回路パターンをフィルタリングして抽出し、フィルタリングして抽出された特定の欠陥又は回路パターンの特徴量の中からマッピングする特徴量を決定し、決定した特徴量の分布状況を画面上にマップ形式で表示するようにした。
(もっと読む)
ノイズ低減装置及びノイズ低減方法

【課題】映像信号のノイズを低減すると共に、テクスチャ部の平滑化を抑える。
【解決手段】第1映像信号の第1注目画素の画素値と複数の第1周辺画素との平均値を第2の映像信号として出力するローパスフィルタ12と、第1映像信号を所定量遅延して第3映像信号として出力する遅延部13と、第2映像信号の第2注目画素と第2周辺画素を抽出する第1周辺画素取込部14と、第2注目画素と同一位置にある第3映像信号の第3注目画素と第3周辺画素を抽出する第2周辺画素取込部15と、第2周辺画素と第2注目画素の画素値による差分値が第1閾値未満であり、かつ、第2周辺画素と同一位置にある第3周辺画素と第3注目画素の画素値との差分値が第2閾値未満のとき、第3周辺画素の画素値を用いて第3注目画素の画素値を算出する相関画素加算部16とを有する。
(もっと読む)
画像処理装置、表示装置、および撮影装置
【課題】動く被写体を連続撮影して得られた複数の静止画像からハイダイナミックレンジの静止画像を作成する際に、2重写りやエッジの乱れの発生を防ぎ、動く被写体のエッジ部分を自然な尾引きで表現する技術を提供する。
【解決手段】同じ被写体を異なる露出で撮影することにより得られた複数の画像を使用してハイダイナミックレンジ画像を作成する画像処理装置であって、適正露出で生成された適正露出画像と適正露出以外で生成された不適正露出画像を入力する入力手段と、前記不適正露出画像に対しローパスフィルター処理を行うフィルター手段と、前記適正露出画像に対し前記フィルター手段の出力画像を合成することで、ハイダイナミックレンジ画像を作成する合成手段と、を有する。
(もっと読む)
画像処理装置、撮像装置、画像処理方法およびプログラム
【課題】高品位な画像回復を行う。
【解決手段】画像処理装置は、被写体のRGBの各色成分に対応する第1フォーカス位置〜第3フォーカス位置で撮像する際の各色成分ごとの複数の劣化画像を取得し、また、その撮像状態と撮像状態に対応する画像回復フィルタを各色成分ごとに取得し、フォーカス位置の撮像状態で得られた画像回復フィルタを使用して各色成分の劣化画像を回復して合成する。
(もっと読む)
撮像装置
【課題】ピントを合わせた領域以外の領域に存在する重要な被写体についてもコントラストと解像度が高くなるようにアパーチャ補正を実行できる撮像装置を提供する。
【解決手段】撮像装置は、光学系を介して生成された光学画像を画像信号に変換する撮像素子と、画像信号に基づく画像において所定の特徴を含む特徴領域を抽出する抽出手段と、画像信号に基づく画像における所定の位置毎に決定されるアパーチャ補正特性に基づいてアパーチャ補正を実施するアパーチャ補正手段と、画像信号に基づく画像における特徴領域の位置に基づいてアパーチャ補正特性を決定する制御手段と、を備える。
(もっと読む)
係数学習装置および方法、画像処理装置および方法、プログラム、並びに記録媒体
【課題】多様な入力信号に対して、その画質に応じて適応的に解像度感/鮮鋭感を向上させて高画質化することを、低コストで実現できるようにする。
【解決手段】回帰予測演算と判別予測演算において、入力画像の注目画素に対応する複数の画素の値から得られる特徴量をパラメータとして与える。このパラメータを入力画像の注目画素に対応する複数の画素の値から得られる5つの特徴量によって構成する。なお、回帰予測演算では、入力画像の注目画素に対応する複数の画素の値から得られる5つの特徴量のうち、2つの特徴量が用いられる。上述の5つの特徴量は、高域フィルタ演算値、低域フィルタ演算値、周辺画素値の最大値、周辺画素値の最小値、および周辺画素値の差分絶対値の最大値とされる。
(もっと読む)
画像処理装置及びそれを用いた撮像装置
【課題】 本発明は、色付きを抑えた良質な画像を得ることが可能な画像処理装置を提供することを課題とする。
【解決手段】 本発明の画像処理装置は、複数の色成分を有する入力画像を回復処理する画像回復処理手段と、前記入力画像と回復処理した回復画像の差分情報を取得する差分情報取得手段と、前記回復処理における回復度合いを調整するための調整係数を設定する調整係数設定手段と、前記入力画像に対して、前記差分情報を前記調整係数に応じて合成することで回復調整画像を生成する回復調整画像生成手段と、前記調整係数に応じて、前記入力画像または前記回復調整画像に対する倍率色収差の補正量を調整する倍率色収差補正手段を有することを特徴とする。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】画質を向上させるとともに、簡単な構成で多様な変換パターンに対応できる画質変換処理を実現することができるようにする。
【解決手段】無限の拡大倍率に対応する予測係数、変換情報などを統合データベースに記憶しておき、統合データベースから拡大倍率に応じた予測係数、変換情報などを算出する。被写体の画像が1.5倍、2倍、2.5倍、3倍の各拡大倍率に対応するサイズの画素によって表示される。便宜上3行3列の矩形により各拡大倍率に対応する画像が示されており、各矩形の大きさが上述の画素のサイズを意味する。1.5倍(「×1.5」)、2倍(「×2.0」)、2.5倍(「×2.5」)、3倍(「×3.0」)の拡大倍率に対応する予測係数を個々に記憶せず、統合データベースに記憶された情報に基づいて、各拡大倍率に対応する予測係数が算出される。
(もっと読む)
画像処理方法、画像処理プログラム、画像処理装置、及び撮像装置
【課題】輝点の波長スペクトルデータや撮影光学系の結像特性データなどの撮影条件データを使用せずとも、撮影画像からフレア成分の情報を高精度に抽出する。
【解決手段】本発明の画像処理方法の一態様は、撮影光学系により取得された処理対象画像を入力する入力手順と、前記処理対象画像のうちフレアの発生領域に含まれる理想的な輝点像成分を推定する推定手順(S183)と、前記発生領域から、フレア成分を含む実際の輝点像成分を抽出する抽出手順(S182)と、前記理想的な輝点像成分と前記実際の輝点像成分との間の相違を、前記発生領域に含まれるフレア成分の指標として算出する算出手順(S184)とを含む。
(もっと読む)
画像処理装置および画像信号処理方法
【課題】画像部分ごとの画像変化の急峻性の度合いに応じた画像鮮鋭化を簡易かつ効率的な処理により実現する。
【解決手段】画像変化特徴量算出部104は、フレーム画像データにおける1つの画素を注目画素とする特徴量算出対象画素ブロック200を対象として算出されたダイナミックレンジと一次微分絶対値とにより画像変化特徴量を算出する。フィルタ係数算出部105は、係数変換データの多項式係数と画像変化特徴量とを利用してフィルタ係数を算出する。鮮鋭化フィルタ部108は、フィルタ処理として、算出されたフィルタ係数と鮮鋭化処理対象画素ブロック210を形成する各画素の画素値とを利用して注目画素の出力画素値を求める。この一連の処理を、フレーム画像データを形成する画素ごとに行う。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】表示画像を撮像した画像からドットどうしの隙間が修正された画像の生成を簡便に、且つ、適正に行う。
【解決手段】複数のドットがマトリクス状に配置されている表示画面に表示された表示画像を撮像した撮像画像を取得する撮像装置100であって、取得された撮像画像の所定の画像領域に対する直角四辺形変換処理を行って直角四辺形画像を生成する四辺形変換処理部5dと、生成された直角四辺形画像に対して、表示画像の所定方向に隣接するドットどうしの隙間に対応する隙間領域の画像データを修正する隙間修正処理を行うフィルタ処理部5gとを備えている。
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】画像に含まれる線状構造物と面状構造物との誤判別を防止する。
【解決手段】フィルタリング部32が、画像中の任意の画素位置における画素値の二階偏微分行列および一階偏微分値を算出する。評価部34が、二階偏微分行列値に基づいて、画素位置における線状構造らしさおよび面状構造らしさの評価値を算出する。この際、一階偏微分値が大きいほど評価値を小さくする。
(もっと読む)
画像処理方法およびそれを用いた放射線撮影装置
【課題】画像処理で発生するアーチファクトを極力抑えつつ、計算負荷が低い画像処理を行うことができる画像処理方法を提供する。
【解決手段】本発明の構成によれば、元画像P0をいったん縮小してこれにローパスフィルタを施し、これを拡大して拡大ローパス画像L1を生成する。この拡大ローパス画像L1を用いて、第2帯域画像βを生成する。これにより、第2帯域画像βを生成するのに多くの時間を要することがない。また、第3帯域画像γは、縮小画像P1にバンドパスフィルタを施すことで取得されるので、第3帯域画像γは、アーチファクトの少ないものとなる。これにより、帯域画像の生成時間と画質とのバランスがとれた画像処理方法が提供できる。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び複眼デジタルカメラ
【課題】誤補正を抑制し、精度の高い視差マップを生成する。
【解決手段】左画像と右画像とを左画像を基準としてステレオマッチングにより対応させて視差マップを生成する。視差マップ上に注目画素を設定し、注目画素に対応する左画像上の画素(左画像注目画素)を中心とした所定サイズのウインドウを左画像に設定し、ウインドウ内に含まれる画素のうち、左画像注目画素のRGB値と近いRGB値を持つ画素を抽出し、抽出された画素の各々に対応する視差マップ上の画素の各々の視差を視差ヒストグラムにエントリして視差ヒストグラムを生成する。注目画素の頻度が所定値未満の場合には、視差ヒストグラムの最頻値の視差で、注目画素の視差を補正する。
(もっと読む)
画像処理装置
【課題】他の装置に分散して画像処理を行う場合であっても、ユーザが望む処理結果を得ることを可能とする。
【解決手段】MFP101は、通信を介して接続する他の画像処理装置から、他の画像処理装置が実施する画像処理の最小単位である単位画像処理と、単位画像処理の処理能力とを示す機器情報を取得する。MFP101は、ユーザからの操作指示により指示された画像処理を、指示された画像処理にかかる単位画像処理ごと画像処理部19で行う。CPU16は、処理結果を含む画像処理が指示された場合に、指示された画像処理にかかる単位画像処理の各々を、機器情報に示された他の画像処理装置の処理能力と、自装置の処理能力とをもとに、処理結果から導き出された条件を満たす画像処理装置に分散して行わせる。
(もっと読む)
ステレオカメラによる平面検出方法とこの方法を用いた移動ロボット
【課題】Hパラメータ推定の安定性を高めることができ、舗装路、砂利道、泥地、砂地、草原等の様々な帯域の模様をもつ平面領域を検出でき、撮影位置の変化による平面検出上の抜けを防ぐことができ、これにより、平面検出の安定性を高めることができるステレオカメラによる平面検出方法とこの方法を用いた移動ロボットを提供する。
【解決手段】異なる標準偏差を有する複数のLOGフィルタを設定し、最大の標準偏差を有するLOGフィルタを用いて画像情報取得ステップと射影変換行列算出ステップを実行し、最大の標準偏差による射影変換行列を動的に推定し(S101〜S104)、次いで、推定した射影変換行列を初期値として、順次小さい標準偏差を有するLOGフィルタを用いて画像情報取得ステップと射影変換行列算出ステップを実行して順次小さい標準偏差による射影変換行列を動的に推定し、これを最小の標準偏差を有するLOGフィルタまで繰り返して最終の射影変換行列を動的に推定する(S111〜S112)。
(もっと読む)
画像処理装置
【課題】画像処理装置において、被写界深度拡大光学系を通した撮像で得られる原画像に対して復元処理およびノイズ低減処理を施してノイズ低減済の復元画像を生成する際の画像品質の低下をより確実に抑制する。
【解決手段】復元処理部10により、被写界深度拡大光学系を通した撮像で得られるノイズを含む原画像G1に対し復元処理を施して復元画像G2を得、判別部20により復元画像G2中のエッジ部Egを判別した結果を用いて、画像抽出部30が、復元画像G2から、エッジ部復元画像G3と平坦部復元画像G4とを抽出する。逆復元処理部40により、平坦部復元画像G4に対し逆復元処理を施して平坦部逆復元画像G5を得る。画像合成部50により平坦部逆復元画像G5とエッジ部復元画像G3とを合成して得られた合成復元画像G6に対し、ノイズ低減処理部60がノイズ低減処理を施して被写界深度の拡大されたノイズ低減済の復元画像G7を得る。
(もっと読む)
画像処理装置、同装置による画像処理方法及び画像処理プログラム
【課題】薄細線の再現性の向上を図ることができ、しかも、薄細線の誤判別時においてもテクスチャーを防止できる画像処理装置等を提供する。
【解決手段】原稿の画像データを読み取る画像読取手段と、前記読み取った画像データを明度データに変換する色変換手段104と、前記明度データのエッジ強度を算出する二次微分フィルタ処理手段105と、前記算出したエッジ強度から薄線候補を検出する薄細線候補検出手段106と、前記簿細線候補の検出結果およびエッジ強度に応じて下地とばし量を決定する薄細線再現補正手段107と、前記薄細線候補の画素とそれ以外の画素でそれぞれ独立した下地とばし処理を行う下地とばし処理手段108とを備える。
(もっと読む)
画像処理装置、画像形成システム及び画像処理プログラム
【課題】 パイプライン処理方式とリコンフィグ処理方式のうち、画像処理に要する時間が短い方の処理方式で複数のDRPを稼動させる画像処理装置、画像形成システム及び画像処理プログラムを提供することを目的とする。
【解決手段】 入力された印刷ジョブの画像情報の画素数に基づいて、リコンフィグ処理方式によって画像処理する場合に要する第1処理時間とパイプライン処理方式によって画像処理する場合に要する第2処理時間とを算出する処理時間算出部32aと、処理時間算出部32aにより算出された第1処理時間と第2処理時間のいずれか短い時間の処理方式によって、複数のDRP61〜66を稼動させる稼動制御部32bと、を有する。
(もっと読む)
信号処理装置及びプログラム
【課題】信号の分解能を向上させる際に、演算の高速化を実現し、高品質な信号を生成する。
【解決手段】状態遷移手段50は、トータルバリエーションの値が小さくなる仮説を生成しやすい確率密度関数Pを用いてトータルバリエーション正則化を行い、予測仮説群{x(n)}を生成する。観測値予測手段60は、予測仮説群{x(n)}を低解像度化して観測予測値z(n)を生成し、尤度演算手段70は、観測予測値z(n)と低解像画像yとを比較し、画像間の類似性が高いほど大きな値の尤度L(n)を演算する。観測更新手段80は、尤度L(n)に基づいて重みw(n)を更新し、代表値演算手段30が、予測仮説群{x(n)}及び更新重み群{w(n)}に基づいて代表値を演算し、超解像画像sを出力する。これにより、従来のように繰り返し演算に伴った計算負荷の高い処理を行う必要がない。
(もっと読む)
201 - 220 / 1,281
[ Back to top ]