
Fターム[5C122FH06]の内容
Fターム[5C122FH06]に分類される特許
681 - 698 / 698
撮像装置および画像補正方法

【課題】動画撮影時の手ぶれ補正において、フレーム内のぶれによる劣化を防止して高品質の画像を復元することが難しい。
【解決手段】撮像素子114を連続的に動作させて順次得られた画像データに対して、フレーム内の手ぶれによる画像データの劣化は、撮影時の手ぶれを検出して記憶されたそのフレームに対応する時系列の手ぶれ検出信号によって復元し、フレーム間で発生した手ぶれによる画像データの劣化は、フレーム間で発生した画像シフトに応じて画像データの相対的な位置を補正して復元する。
(もっと読む)
撮像装置および画像復元方法

【課題】静止画手ぶれ補正を撮像後に所定の画像復元演算を行なう場合は、手ぶれ補正の設定や手ぶれ補正を確認することは難しい。
【解決手段】静止画撮影モードでの露光時に、角速度センサ108,109、アナログ処理回路110で検出した手ぶれ検出信号を軌跡メモリー回路113に記憶し、静止画撮像の動作時に、手ぶれ検出信号に基づいて画像復元演算回路123によって画像データの手ぶれによる劣化の復元を行なっている。そして、スルー画表示の動作時には、画像復元演算回路123とは異なる画像シフト回路132を動作させ、画像復元演算回路123の動作が設定されていれば、スルー画表示時に画像シフト回路132の動作を連動して設定し、画像復元演算回路123の非動作が設定されていれば、スルー画表示時に画像シフト回路132の非動作を連動して設定している。
(もっと読む)
内視鏡装置および画像信号処理装置
【課題】広角の撮像が可能である撮像部が撮像した、撮像部に設けられた対物光学系の光軸を中心とした領域である中心領域以外の領域である周辺領域の像において、歪の少ない像として被検体の観察を行うことができるような内視鏡装置および画像信号処理装置を提供する。
【解決手段】内視鏡装置1は、操作部3と、撮像部4aと、ビデオプロセッサ6とを有し、操作部3は、表示領域変更指示部であるノブ3aを有し、ビデオプロセッサ6は、ノブ3aの指示に基づき、撮像部4aが撮像した像の画像信号に対し、湾曲歪補償処理を行う。
(もっと読む)
変倍光学系及びそれを用いた電子機器
【課題】 低コスト化と小型化との両立が効果的に可能な変倍光学系及びそれを用いた電子機器。
【解決手段】 物体側から順に、負の屈折力を有する第1レンズ群G1と、正の屈折力を有する第2レンズ群G2と、負の屈折力を有する第3レンズ群G3と、正の屈折力を有する第4レンズ群G4とから構成された変倍光学系であって、第2レンズ群G2は1枚の正レンズからなり、第1レンズ群G1はシェイピングファクターに関する条件式を満足する変倍光学系。
(もっと読む)
変倍光学系及びそれを用いた電子機器
【課題】 低コスト化と小型化との両立が効果的に可能な変倍光学系及びそれを用いた電子機器。
【解決手段】 物体側から順に、負の屈折力を有する第1レンズ群G1と、正の屈折力を有する第2レンズ群G2と、負の屈折力を有する第3レンズ群G3と、正の屈折力を有する第4レンズ群G4とから構成された変倍光学系であって、第2レンズ群G2は1枚の正レンズからなり、その正レンズは、屈折率の温度係数に関する条件式を満足する変倍光学系。
(もっと読む)
撮影システム
【課題】スタジオポートレート撮影を狭小なスペースにおいて行うことができるとともに、最小限の照明装置で行うことができる撮影システムを提供する。
【解決手段】 まず、被写体を撮影する(ステップS10)。次に、歪曲収差補正用画像データを用いて歪曲収差の補正を行う(ステップS12)。歪曲収差補正用画像データは、撮影システム10の設置時に、デジタルカメラ30の複数のズーム焦点距離ごとに歪曲収差補正用部材36を撮影し、画像処理装置32に記憶されているものである。そして、陰影補正用画像データを用いて画像の各点の明度(輝度)の補正量(陰影補正量)が算出し陰影の補正を行う(ステップS14)。陰影補正用画像データは、最適な照明条件で被写体(人体モデル)56を撮影した画像データである。
(もっと読む)
変倍光学系及びそれを用いた電子機器
【課題】 低コスト化と小型化との両立が効果的に可能な変倍光学系及びそれを用いた電子機器。
【解決手段】 物体側から順に、負の屈折力を有する第1レンズ群G1と、正の屈折力を有する第2レンズ群G2と、負の屈折力を有する第3レンズ群G3と、正の屈折力を有する第4レンズ群G4とから構成された変倍光学系であって、第2レンズ群G2は1枚の正レンズからなり、第2レンズ群G2と第3レンズ群G3はそれらの広角端における合成の前側主点位置とレンズ厚さの総和との比に関する条件式を満足する変倍光学系。
(もっと読む)
電子フォトアルバム及びデジタルカメラ
【課題】デジタルカメラが撮影時に記録した各種情報に基づいて画像を見やすいように表示画面に配置できる電子フォトアルバムを提供する。
【解決手段】S2では、RAM8に記憶されたExifファイルの所定のタグに記録されている角度情報θを読み取る。S7では、画像の傾きを補正する角度θ’を設定する。補正角度θ’は撮影時のデジタルカメラ200の傾斜を略補正するような値である。表示コントローラ32は、Exifファイルのデータ部分に記録されている画像を補正角度θ’だけ傾斜させて表示装置Dに表示する。
(もっと読む)
情報処理装置および方法、記録媒体、並びにプログラム
【課題】 全方位画像を高速で高画質の2次元平面画像に変換させるようにする。
【解決手段】 分担決定部104の負荷計算部161は、負荷分布テーブル131に基づいて、マッピングアルゴリズム毎の処理時間を負荷として計算する。比率計算部162は、処理時間に基づいて、マッピングアルゴリズム毎の負荷の比率を計算する。分担確定部163は、負荷の比率の情報に基づいて、サブプロセッサ43の処理分担を決定する。振分部105は、処理分担の情報に基づいて、マッピングアルゴリズムのプログラムを各サブプロセッサ43に供給する。サブプロセッサ43は、各処理分担となるマッピングアルゴリズムの処理を実行し、処理結果を処理結果画像データFIFO部143に記憶させる。画像再生処理部106は、処理結果画像データFIFO部143より処理結果となる2次元平面画像を合成し、表示部171に表示させる。
(もっと読む)
撮像装置
【課題】 車両のデザインを損なうことなく、車両周辺を鮮明に撮像することができる撮像装置を提供する。
【解決手段】 視覚センサB1と、視覚センサB1を収納可能な収納手段4と、視覚センサB1を収納手段4内もしくは収納手段4外に移動させる駆動手段5と、を車両Aに搭載する撮像装置であって、車両Aの状態を検出する車速センサK1と、検出センサK1からの検出信号に基づいて駆動手段5を作動させることによって視覚センサB1を収納手段4に収納するように促す制御手段K2と、を備えてなる。
(もっと読む)
画像の歪み補正方法
【課題】 画像の歪曲収差補正を簡便に高精度で行う。
【解決手段】 中央に配置される中心円と等間隔に配置される格子点とを有する歪曲補正図をカメラよって撮影してデジタルデータである実写歪曲補正画像を取得し、該画像における中心円の直径と格子点の間隔との比から理想格子点の位置を決定し、各実写格子点の位置と理想格子点の位置とに基づく補正式を求め、該補正式により歪曲収差を補正する。
(もっと読む)
画像入出力装置
【課題】 被写体に記述された記述情報が予め設定されている参照情報と一致するかを判断し、その判断結果を示す判断結果情報を投影手段で投影することで簡易に取得することができる画像入出力装置を提供すること。
【解決手段】 解答用紙Pに記述されている記述情報としての解答は、その解答用紙Pを撮像した撮像データから記述情報認識手段によって認識され、その認識された記述情報は、記憶手段に予め設定されている参照情報と一致するか否かが判断される。そして、その判断結果を示す判断結果情報として、一致していることを示す「○」の記号や不一致であることを示す「×」の記号が、投影手段によって解答用紙P上に投影される。
(もっと読む)
撮影装置、画像処理方法及びプログラム
【課題】撮影した原稿の種類や背景色に応じて適切な画像補正をおこなう。
【解決手段】デジタルカメラ1は、撮影対象物として白板WB上の原稿(文字、図、写真など)を撮影した画像から輝度ヒストグラムと色相ヒストグラムを取得する。デジタルカメラ1は、取得した輝度ヒストグラムにおける最大値、最小値、ピーク値を示す輝度ヒストグラムパラメータと、色相ヒストグラムにおける最大値、最小値、ピーク値、平均値、および、色差分散値を示す色相ヒストグラムパラメータを抽出する。デジタルカメラ1は、抽出した輝度ヒストグラムパラメータと色相ヒストグラムパラメータを用いて、撮影された原稿の種類と背景色を判別する。デジタルカメラ1は、判別した原稿の種類と背景色とに応じて、原稿の視認性を向上させるための画像処理を最適化する。
(もっと読む)
画像フィールドデータを修正するための技術
2次元光センサからのデータに出現する画像シェーディング変化を補正するためにデジタルカメラ、ビデオ画像取り込み装置、および他の光学系において実行され得る画像データの修正技術を提供する。これらの変化は、例えば、不完全なレンズ、光センサにおける不均一な感度、および光学系のハウジング内での内部反射に起因して生じ得る変化である。これらの変化を補正するために、カメラまたは他の光学系内の小さなメモリに少量の修正データが、好ましくは各原色について別々の補正データが、記憶される。修正データは、画像データが捕捉されているのと同じ速度で即座に生成されるので、修正は、画像センサからのデータ転送を遅らせることなく行われる。 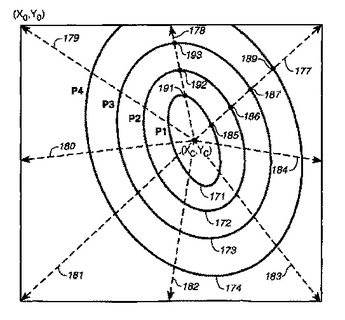 (もっと読む)
(もっと読む)
撮像装置
撮像装置100は、被写体の光学像を形成する結像光学系110と、光学像の所定領域の画像信号を出力する撮像デバイス120と、出力画像の領域を設定する領域設定部132と、撮像デバイス120内の読み出し制御部124の画素間引き読み出し規則を設定する読み出し規則設定部134と、撮像デバイス120から出力される画像データを帯域分離処理して第一成分の画像データと第二成分の画像データとを出力する帯域分離処理部152と、第一成分の画像データを少ないビット深度の画像データに変換するビット深度変換処理部154と、ビット深度変換された第一成分の画像データの歪みを補正する歪み補正部140と、歪み補正後の第一成分の画像データと帯域分離処理部152からの第二成分の画像データとを合成する合成処理部156とを備えている。 (もっと読む)
ひずみのない画像をリアルタイムに表示するパノラマ・ビデオ・システム
パノラマ環状レンズ(panoramic annular lens、PAL)・システム、単一のビデオカメラ、及びPCベースのソフトウェア・システムである。このソフトウェア・システムは、360度のビデオ画像を、シームレスでひずみのない水平イメージにリアルタイムに展開する。本発明の好適な実施形態におけるPALシステムは、直径40mmの小型パッケージ内に、360度の水平視野と、90度の垂直視野を有する。本発明に使用可能なレンズ・システムの種類は、制限されない。実際、360度パノラマ視野を提供可能なレンズ・システムは多数存在する。ビデオカメラとしては、CCD或いはCMOSベースのデバイスを使用可能である。このビデオカメラは、1280×1024(高解像度)或いは720×480(NTSC)のピクセル解像度を有する。展開システムは、放射線計測レイ・トレーシング・プログラムである。このプログラムは、コンピュータのグラフィックス・カードの機能を用いて実行される。このグラフィックス・カードの機能は、ソフトウェアのオーバーヘッドを最小化しながら、非常に効率的に局部的な変換を行う機能である。結果として、ひずみのある球面画像からカルテシアン座標上のパノラマ画像へ、高解像度30fpsでリアルタイムに変換することが可能となる。
 (もっと読む)
(もっと読む)
低減された画像バッファメモリおよびサービスセンターを通した再利用のための最小限の処理を有するデジタルカメラ
取り込み機能、処理機能および保存機能が既存システムとは異なって分割されたデジタルカメラシステムを提供する。手持ち式デジタルカメラは、商業用画像処理サービスセンターに存在し得るワークステーションと共に使用される。最小限の量の画像データ処理がデジタルカメラにおいて実行され、その結果、より低いメモリ要件、より低い処理要件およびより低いパワー要件に起因して、デジタルカメラの原価のかなりの低減が可能になる。生または最小限処理された画像データの迅速な収集および保存を可能にするため、リアルタイムシングルパス画像圧縮手法がこのデジタルカメラ内部で使用される。画像データが転送されるワークステーションは、既存のカメラ内部で通常行われる画像処理を実行する。この処理は、小型カメラと比較して、このようなワークステーションにおいて持つことが可能な増大された計算パワーおよびこのような処理を実行し得る増大された時間を利用する。 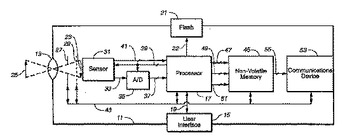 (もっと読む)
(もっと読む)
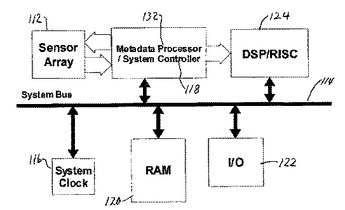
センサレベル画像歪み軽減方法および装置
画像の取得中にイメージセンサアレイ(112)のピクセルまたはピクセル領域をサンプリングして得られるメタデータ(132)を使用して画像処理を行う方法、装置およびソフトウェアプロダクト。画像形成中にアレイの個別のピクセルまたはピクセル領域に(非線形)信号処理方法を適用することにより性能向上が達成される。記述されてたその場信号処理方法は画像形成プロセスの知識を梃子としてアレイ内のピクセルの信号品質を選択する。本発明の方法、装置およびソフトウェアプロダクトは画像の取得後処理または画像の取得中または取得直後の処理に使用することができる。本方法の実施例はデジタル撮像アレイ内のノイズ、ぶれ、および低コントラスト歪みを軽減する。ハードウェアおよびソフトウェア実施例も提起される。
 (もっと読む)
(もっと読む)
681 - 698 / 698
[ Back to top ]