
Fターム[5D088NN14]の内容
トラック変更、選択のためのヘッド移動 (342) | ヘッド移動速度制御 (152) | 発明、考案の目的、特徴 (62) | フィードフォワード制御(明記されたもの) (16)
Fターム[5D088NN14]に分類される特許
1 - 16 / 16
シーク制御装置、およびシーク制御のための制御データ生成方法
【課題】ショートシーク制御のセトリング時における応答劣化を低減し、かつ、アクセス時間の向上及び書き込みエラーの発生防止を図る。
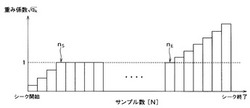
【解決手段】シーク時の加速度データを生成する方法であって、シーク距離の入力、該シーク時間、またはシーク時間をサンプル時間で除算して得られるサンプル数の入力を受け付け、隣り合うサンプル時刻間の加速度変化率の2乗を重み係数で重み付けした値の総和を表す目的関数を、各サンプル時刻の加速度と、シーク時間またはサンプル数と、シーク距離とに基づいた制約条件の下、最小化するように最適化計算することにより各サンプル時刻における最適加速度を求める。または、加速度変化率の二乗和と加速度入力のパワースペクトルを評価するH∞ノルム、目標軌道のH2ノルム、および加速度入力の二乗和を評価項目とし、これらを同時最小化するLMI(線形行列不等式)を解くことによって最適加速度を求める。
(もっと読む)
磁気ディスク装置及び磁気ヘッドの制御方法

【課題】磁気ディスク装置のシーク制御において、外力に対してロバストなシーク制御系を構成できる磁気ディスク装置及び磁気ヘッドの制御方法を提供する。
【解決手段】磁気ディスクに情報を記録再生する磁気ヘッドを移動させる駆動部と、前記駆動部を制御する制御手段と、を備え、前記制御手段は、積分器と位相進み補償器とを有し、前記磁気ヘッドの目標位置と検出位置との差に基づいて位置指令を求めて前記駆動部をフィードバック制御する位置誤差フィードバック制御系と、前記磁気ヘッドの目標移動距離を入力し、前記駆動部の数式モデルを用いて電流指令を前記駆動部に出力する2自由度制御系と、を有し、前記制御手段は、前記磁気ヘッドの位置決め制御時と、シーク時と、の両時において、前記積分器の出力を前記駆動部に与えつつ、前記位相進み補償器の出力を用いて前記数式モデルを更新することを特徴とする磁気ディスク装置が提供される。
(もっと読む)
磁気ディスク装置及び磁気ヘッドの制御方法
【課題】磁気ディスク装置のシーク制御において、外力に対してロバストなシーク制御系を構成できる磁気ディスク装置及び磁気ヘッドの制御方法を提供する。
【解決手段】磁気ディスクに情報を記録再生する磁気ヘッドを移動させる駆動部と、前記駆動部を制御する制御手段と、を備え、前記制御手段は、積分器と位相進み補償器とを有し、前記磁気ヘッドの目標位置と検出位置との差に基づいて位置指令を求めて前記駆動部をフィードバック制御する位置誤差フィードバック制御系と、前記磁気ヘッドの目標移動距離を入力し、前記駆動部の数式モデルを用いて電流指令を前記駆動部に出力する2自由度制御系と、を有し、前記制御手段は、前記数式モデルを更新し、前記更新に際して、前記積分器の出力は前記駆動部に与えつつ、前記位相進み補償器の出力を用いて前記数式モデルを更新する第1の更新モードを有することを特徴とする磁気ディスク装置が提供される。
(もっと読む)
磁気ディスク装置及び磁気ヘッドの制御方法
【課題】磁気ヘッドの下にデータセクタが来たときに速やかにデータを書き込むことができる磁気ディスク装置及び磁気ヘッドの制御方法を提供する。
【解決手段】磁気ディスクに情報を磁気的に記録再生する磁気ヘッドを移動させる駆動部と、前記磁気ヘッドの目標位置と検出位置との差に基づいて前記駆動部をフィードバック制御する位置誤差フィードバック制御系と、前記磁気ヘッドの移動前の位置と、前記磁気ヘッドの目標位置と、記録再生を行うデータセクタの位置と、に基づき、目標速度曲線を可変とし、前記駆動部の制御数式モデルを用いて前記駆動部の速度が前記目標速度曲線に追従するように前記駆動部を制御する速度制御系と、を備えたことを特徴とする磁気ディスク装置が提供される。
(もっと読む)
ディスク装置、制御装置およびプログラム
【課題】ディスク装置のロード時におけるヘッド速度の変化量を抑制し、ヘッド速度が目標値に収束する時間を早める。
【解決手段】ディスクと、ヘッドと、ヘッドを支持するアームと、入力される操作量に応じた速度でアームを軸を中心に回転運動させることによりディスクの面上および面外にヘッドを移動させる駆動部20と、ディスク上から退避したヘッドを収容するランプ部と、ヘッドをランプ部からディスク上へとロードする際のアームの移動速度を制御する制御部22とを備え、制御部22は、駆動部20によりアームを動かす場合に加わる外力を推定する推定部71と、推定された外力に応じて操作量を補正する補正部73とを有する。
(もっと読む)
二自由度位置制御方法、二自由度位置制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御による位置制御装置において、固定小数点のプロセッサを用いて、計算精度を向上する。
【解決手段】オブザーバを使用した二自由度制御系(26)の入力である目標位置軌道、位置誤差を基準軌道を基準とした相対値とし、オブザーバの状態変数が、基準位置からの相対的な距離を保持するようにした。絶対的な距離を保持する場合に比べて,値の変化する範囲が小さくなり、固定小数点方式でも、小数点の有効桁数を増加でき、計算精度が改善できる。このため、加速区間における制御電流が滑らかになり、共振や騒音の発生を防止でき、定速区間や減速区間では、残留振動の発生を防止でき、シーク時間を短縮できる。
(もっと読む)
シーク制御方法、シーク制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御によるシーク制御制御装置において、シーク制御からフォローイング制御への切り替え時の電流段差を防止する。
【解決手段】シーク制御からフォローイング制御への切り替え時に、電流段差解消軌道生成部(28)が、電流値u(n),u(n−1)の差分から段差分の電流値Udiffを計算し、この計算値を相殺する目標位置軌道r‘(n)(又は目標電流軌道)を、フォローイング用コントローラ(22)に供給する。このため、出力電流の電流段差が解消される。
(もっと読む)
2自由度位置制御方法、2自由度位置制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御による位置制御装置において、演算による出力遅延による位置精度劣化を防止する。
【解決手段】オーバーラン防止のための二自由度制御系において、二自由度制御の出力の遅延(演算遅延及び駆動アンプ、D/Aコンバータ等のハード遅延)を考慮して、サンプル時点から遅延分進んだTdの推定状態を演算し、この推定状態から出力を演算する。サンプル時点から、計算中に状態変化があっても、出力遅延の影響を防止し、精度の高い位置制御が可能となり、オーバーランを防止できる。
(もっと読む)
シーク制御方法、シーク制御装置およびディスク装置
【課題】プラントをシーク制御するシーク制御装置において、シーク電流生成のためのモデルとプラントのモデルとの誤差による位置ずれを防止する。
【解決手段】シーク軌道生成(28)からシーク軌道を与えて、プラント(40)をシーク制御する際に、シーク時間に応じて、フィードバックループ(20,22,24)の周波数特性を、変更し、実際のプラント(40)とプラント(40)のモデルのずれに起因する位置ずれ成分のゲインを高くして、フィードバックループ(20,22,24)で、位置ずれを抑圧するよう制御する。シーク時間のばらつきを低減でき、且つオーバーラン、アンダーランを防止できる。
(もっと読む)
磁気ディスク装置
【課題】制御の応答性の遅延を招くことなく、シーク時の音を低減する磁気ディスク装置を提供する。
【解決手段】磁気ディスク装置1の制御回路11は、磁気ヘッド14を磁気ディスク13上に形成された目標トラックへ移動させるシーク動作の際に、ボイスコイルモータ15の駆動電力を制御して、磁気ヘッド14の移動速度を所定の目標速度に近づける。そして、制御回路11は、磁気ヘッド14を所定の目標速度に向けて加速させる加速区間において、前記所定の目標速度と実際の移動速度との差に応じて仮の電流値を定め、当該仮の電流値が、加速開始からの経過時間に関係して規定される制限値を超える場合に、当該制限値をボイスコイルモータ15の駆動電力の電流値として、ボイスコイルモータ15を制御する。
(もっと読む)
ディスクドライブのトラックシークサーボを制御する方法、装置および記録媒体と、これを用いたディスクドライブ
【課題】ディスクドライブのトラックシークサーボを制御する方法、装置および記録媒体を提供する。
【解決手段】ディスクドライブを制御する方法において、トラックシークモードで加速区間と減速区間とが対称性を有する変形されたPTOS(Proximate-Time Optimal Servo)速度軌跡を生成するステップと、変形されたPTOS速度軌跡を適用してヘッドの動作を制御するステップと、を含む。かかる方法によれば、PTOS速度軌跡が加速区間と減速区間とで対称性を有するように変形され、当該軌跡を用いてヘッドの動作が制御されるので、急激な電流変化が抑制され、速度軌跡の生成に要する計算時間が短縮される。
(もっと読む)
磁気ディスク装置
【課題】磁気ディスク装置において、機構共振をモデル化した簡単なフィードフォワード制御により高速高精度なシーク動作を行わせること。
【解決手段】磁気ディスク装置は、磁気ディスク、磁気ヘッド、磁気ヘッドを支持して位置決めするヘッドアクチュエータ、磁気ヘッドが所定位置にあるように制御する制御装置を備える。制御装置は、ヘッド位置信号を生成する手段と、磁気ヘッドの目標位置までの目標位置軌道101を生成する手段と、目標位置軌道101からヘッドアクチュエータの近似逆モデル105Aを用いてフィードフォワード制御入力を生成する手段とを有する。フィードフォワード制御入力を生成する手段は、ヘッドアクチュエータの近似逆モデル105Aに共振逆モデル1を追加してヘッドアクチュエータの機構系の共振を含む周波数帯までモデル化している。
(もっと読む)
供給電圧変動を考慮した探索サーボ制御方法とこれを利用したディスクドライブおよびコンピュータで読み取り可能な記録媒体
【課題】供給電圧変動を考慮して最適な探索制御を実行する探索サーボ制御方法とこれを利用したディスクドライブ,およびコンピュータで読み取り可能な記録媒体を提供する。
【解決手段】ディスクドライブの供給電圧変動を考慮した探索サーボ制御方法は,ディスクドライブに供給される電圧を測定するステップと,測定された供給電圧に基づいてトラック探索距離に対応する探索時間を調整するステップと,上記調整した探索時間を用いて位置,速度および加速度軌跡を求め,探索制御を行うステップとを含む。
(もっと読む)
振動を抑制したヘッドシーク制御方法、及び回転記録再生装置
【課題】 回転記録再生装置のヘッドのシーク制御において、アクチュエータの駆動力を有効に活用しながら、騒音を減少しつつシーク時間を短縮する。
【解決手段】 マイクロプロセッサがヘッドシーク用アクチュエータに与える駆動電流の制御信号の生成に際し、信号生成器91は、アクチュエータの加速時には許容最大加速度を生じる所定の加速度を生成し、減速時には許容最大減速度を与える所定の減速信号を生成し、セトリング時にはゼロレベルのセトリング信号を生成する。そして減速からセトリングへの切り替えは、目標位置に最短時間で到達できるためにセトリングを開始すべき時間としてマイクロプロセッサが計算した時点とする。
(もっと読む)
多重サイン波形のシークサーボでのトルク定数の補正方法及びディスクドライブ
【課題】多重サイン波形の軌跡をそのまま利用してトルク定数補正値を生成させる多重サイン波形のシークサーボでのトルク定数の補正方法及びディスクドライブを提供すること。
【解決手段】多重サインシーク方式を適用してテストシークルーチンを実行させるステップS402と,上記テストシークルーチンによって生成されるシーク駆動電流軌跡値を保存するステップS403と,上記シーク駆動電流軌跡値に対して離散フーリエ変換を実行して,一次高調波サイン係数を算出するステップS404,S405と,上記テストシークに適用された多重サインシークの設計電流軌跡から一次高調波サイン係数を算出するステップS406と,上記離散フーリエ変換を実行して求めた一次高調波サイン係数と,上記多重サインシークの設計電流軌跡から算出された一次高調波サイン係数と,の割合でトルク補正定数値を決定するステップS407と,を含む。
(もっと読む)
ハードディスクドライブのトラック探索制御方法,記録媒体,およびハードディスクドライブ
【課題】正弦波の加速度軌跡によるトラック探索制御装置において,利得歪曲及び位相遅延を補償するトラック探索制御方法,記録媒体及び装置を提供する。
【解決手段】正弦波の加速度軌跡による位置y*(n),速度v*(n)及び加速度a*(n)を得るための理想的な正弦波と,利得歪曲及び位相遅延を表す正弦波とを合成し,合成された正弦波,すなわち利得歪曲及び位相遅延を補償するための正弦波によりVCM駆動信号u(n)を発生させることによって,利得歪曲及び位相遅延C(j2πf)を補償するハードディスクドライブのトラック探索制御方法である。
(もっと読む)
1 - 16 / 16
[ Back to top ]