
Fターム[5D096HH06]の内容
トラック探索、整列のためのヘッド移動 (3,141) | 発明、考案の特徴 (182) | TESを得るのに帯域ろ波しているもの (7)
Fターム[5D096HH06]に分類される特許
1 - 7 / 7
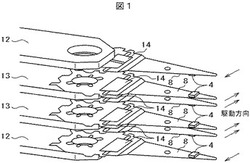
磁気ヘッド駆動装置およびそれを用いた磁気ディスク装置
【課題】
励起されるアームモードの数を一つにし、すべてのヘッドの励起されるアームモードの周波数応答を同位相にすることで、制御コントローラの位相ロスを減らし、制御系の安定を確保した高精度の位置決め精度を可能とする。
【解決手段】
マイクロアクチュエータ8とメインアクチュエータを搭載する磁気ヘッド4駆動装置において、両端アーム12のマイクロアクチュエータ8どうしは同方向に駆動し、中間アーム13のマイクロアクチュエータ8は前記両端アーム12のマイクロアクチュエータ8の駆動方向と反対方向に駆動する。
(もっと読む)
周回メモリ、及びディスク装置

【課題】メモリに記憶された情報と被補償信号に大きな差が生じた場合でも、不要な学習を回避でき、目標値の追従性能を損なわない周回メモリ、及び該周回メモリを備えるディスク装置を提供する。
【解決手段】入力される被補償信号の1周期分を記憶するメモリ15を0クリアするメモリリセット部19を備え、コントローラ20を介してディスク装置の状態に応じてメモリ15に記憶された信号情報のリセットを自在に行えるようにした。
(もっと読む)
位置決め制御装置の整定判定方法及び位置決め制御装置
【課題】対象物が目標位置に整定したことを判定する整定判定方法において、整定判定のマージンを拡大し、正確に整定判定する。
【解決手段】整定判定ブロック(24)の整定判定式として、位置誤差と、位置誤差の複数サンプル数の加算値とを併用する。特に、低周波数域での振動に対し、整定判定のマージンが大きくなる。このため、低周波数域での振動があっても、整定判定条件を外れていると判定することを、より少なくでき、動作(例えば、リード/ライト動作)を継続できる。
(もっと読む)
記録ディスクへのパターン書き込み方法及びデータ記憶装置
【課題】SSWにおける誤差伝播防止のためのサーボ補正を効率的に行う。
【解決手段】サーボ位置信号生成部231は、サーボ・チャネル211からのサーボ信号に基づいて、リード素子の現在位置を示すサーボ位置信号を生成する。ターゲット位置設定部232は、リード素子がフォロしているトラック書き込み時のPESと予め登録されている補正係数との積和演算により補正値を生成する。この補正値と基準ターゲット位置とから補正ターゲット位置を生成し、位置誤差量算出部233に出力する。位置誤差量算出部233は、サーボ位置信号とターゲット位置信号とから位置誤差信号(PES)を生成し、サーボ・コントローラ234に出力する。サーボ・コントローラ234は、PESに従って制御信号(DACOUT)を生成し、モータ・ドライバ・ユニット22はその制御信号に従って所定値の電流をVCM15に供給する。
(もっと読む)
磁気記録再生装置及びその制御方法、磁気記録媒体、磁気記録媒体製造用スタンパ
【課題】位置制御信号の出力を増大し、磁気ヘッドの位置決め制御を高精度で行うことができる磁気記録再生装置及びその制御方法を提供する。
【解決手段】複数のバースト信号グループによって位置情報が記録され、前記各バースト信号グループは磁性層で形成される凹凸パターンの1つの凹部及び1つの凸部のいずれか一方のみからなる磁気記録媒体と、バースト信号グループに相当する再生信号を面積積分するゲート回路12及び積分器14と、を有する磁気記録再生装置とした。
(もっと読む)
低周波外乱補償制御装置とそれを利用したディスクドライブ
【課題】ディスクドライブのサーボ制御装置に係り、特に、ディスクドライブに引き込まれる低周波外乱を効果的に補償するための装置を提供する。
【解決手段】ディスクドライブのサーボ制御装置において、ヘッドの動きを制御する制御入力及び位置エラー信号を入力して、所定の状態方程式を利用して位置予測誤差を算出する状態変数予測器、外乱と位置予測誤差との数学的な関係を利用して、位置予測誤差から外乱推定値を算出する推定フィルタ、及び制御入力から前記外乱推定値を減算する減算器を備えることを特徴とする低周波外乱補償制御装置である。
(もっと読む)
周回メモリ、及びディスク装置
【課題】メモリに記憶された情報と被補償信号に大きな差が生じた場合でも、不要な学習を回避でき、目標値の追従性能を損なわない周回メモリ、及び該周回メモリを備えるディスク装置を提供する。
【解決手段】 入力される被補償信号の1周期分を記憶するメモリ15を0クリアするメモリリセット部19を備え、コントローラ20を介してディスク装置の状態に応じてメモリ15に記憶された信号情報のリセットを自在に行えるようにした。
(もっと読む)
1 - 7 / 7
[ Back to top ]