
Fターム[5D096KK04]の内容
トラック探索、整列のためのヘッド移動 (3,141) | 発明、考案の目的 (335) | オフセット対策 (70) | 温度、湿度オフセット対策 (6)
Fターム[5D096KK04]に分類される特許
1 - 6 / 6
熱ドリフトを補正する閉ループ位置付けシステムを持った磁器ヘッド/ディスクテスター
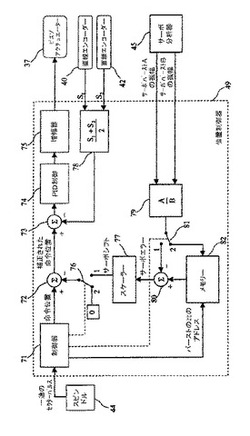
【課題】磁気ディスクに対する磁気ヘッドの位置付けにおいて発生する熱ドリフトを補正する。
【解決手段】磁気ヘッドの大まかな位置付けを行うステップモーターと、細かな位置付けのために使用されるピエゾアクチュエーター37を含む。往復台の両側に配置された直線エンコーダー40及び42は、ピエゾアクチュエーターを制御する閉ループ位置付けシステムへフィードバック情報を供給する。サーボバーストは、同じ閉ループ位置付けシステムのための付加的なフィードバックの情報源として使用される。指示された命令位置への磁気ヘッドの移動の間、サーボバーストフィードバックはオフにされ、ヘッドを移動させるために、直線エンコーダーからのフィードバックがPIDループによって使用される。磁気ヘッドが指示された命令位置に到達したとき、予め書き込まれたバースト信号の比が一定に保持されるように、PIDループの命令位置を変化させる。
(もっと読む)
ディスク・ドライブ及びサーボ・データ検出のための処理タイミングの制御方法

【課題】、効率的な処理によってサーボ・セクタ間の時間間隔の変化に応じてタイミングを調整する。
【解決手段】本発明の一実施形態のHDDは、ユーザ・データのリードあるいはライトのためのフォローイング中にサーボ・セクタの時間間隔を測定し、その測定結果に応じてサーボ・セクタ検出のためのタイミング信号を制御する。HDDは、時間間隔の測定結果を規定の複数ゾーンの内のいずれに含まれるか特定する。過去の複数の時間間隔のゾーンによって時間間隔の変化について判定し、時間間隔の変化が規定範囲にある場合にサーボ・セクタ検出のためのタイミングを変化させる。これにより、効率的な処理によってサーボ・セクタ間の時間間隔の変化に応じてタイミングを調整することができる
(もっと読む)
読み取り/書き込みヘッド位置を制御する方法および読み取り/書き込みヘッドを試験するための装置
【課題】
【解決手段】 試験装置(1)でディスク(2)に対する読み取り/書き込みヘッド(4)の位置を制御する方法が開示される。試験装置(1)はヘッド(4)を位置決めするためのポジショナ(7)を有する。ポジショナ(4)は、該ポジショナ(7)によって得られる実際の位置を測定するためのセンサ(12)を有する。当該方法は、ポジショナ(7)によって得られる実際の位置を測定するセンサ信号(13)を生成するステップと、ヘッド(4)で検出されるディスク(2)に対するヘッド(4)の位置誤差信号(20)を生成するステップと、ヘッドの位置誤差信号(20)をハイパスフィルタリング(21)するとともに、センサ信号(13)をローパスフィルタリング(14)して、それらの信号間で周波数の重なり合いが実質的に存在しないようにするステップと、ヘッド(4)の任意のドリフトに対応するヘッド位置誤差信号(20)から低周波のヘッド誤差信号(24)を得るステップとを含む。
(もっと読む)
記録面にパターンを書き込む方法
【課題】セルフ・サーボ・ライトにおいて、サーボ・パターンのトラック・ピッチが、大きく変動することを抑制する。
【解決手段】本発明の一実施形態において、サーボ・ライト制御装置は、HDA1のセルフ・サーボ・ライトにおいて、キャリブレーション・シーケンスの後に、プリアンプIC13の発熱が増加するように、所定のシーケンスを行う。その後、磁気ディスク11へのパターン書き込みシーケンスを開始する。これによって、キャリブレーション・シーケンスの前後において書き込まれるサーボ・パターンのトラック・ピッチが、大きく変動することを抑制する。
(もっと読む)
トラッキング誤差信号検出装置及び磁気記録装置
【課題】トラッキング誤差信号のダイナミックレンジ及び利得が低下せず、安定した動作が可能なトラッキング誤差信号検出装置及び磁気記録装置を提供する。
【解決手段】光ビームを出射する光源と、光ビームを反射体上へ微小スポットとして収束させる集光光学系と、反射体により反射され、回折されたビームを分岐するビーム分岐手段と、ビーム分岐手段により分岐されたビームを受光し、光量に応じた信号を出力する光検出器と、光検出器から出力される信号を演算してトラッキング誤差信号を生成する信号処理部を具備し、反射体には反射率の変化を与える周期的な物理変化が形成され、物理的な変化の方向と平行な方向における反射体上に収束されたビームの大きさを物理的な変化の方向に直交する方向における大きさよりも大きくする。
(もっと読む)
ハードディスクドライブのレファレンスサーボ信号の記録方法及び温度補償方法
【課題】ハードディスクドライブのレファレンスサーボ信号の記録方法及び温度補償方法を提供する。
【解決手段】ディスク上のレファレンスサーボ信号の記録終了方向に同心円状に第1基準パターンを記録する過程と、現在スパイラルトラックの記録開始位置から現在スパイラルトラックにレファレンスサーボ信号を記録する過程と、アクチュエータアームが熱膨張のない場合における記録開始位置から記録終了位置までの距離に相応する所定角度ほど移動した後から、第1基準パターンまでの前記アクチュエータアームの移動角度を検出する過程と、検出された移動角度を参照して前記アクチュエータアームの駆動速度を補償する過程と、補償されたアクチュエータアームの駆動速度によって、次のスパイラルトラックにレファレンスサーボ信号を記録する過程と、を含むことを特徴とする。
(もっと読む)
1 - 6 / 6
[ Back to top ]