
Fターム[5D096RR06]の内容
トラック探索、整列のためのヘッド移動 (3,141) | トラッキング制御系の設定、変更 (82) | 振動、欠陥、傷、異常の検出による変更 (14)
Fターム[5D096RR06]の下位に属するFターム
読取り誤り検出によるもの
主情報信号のレベル検出によるもの
TES自体のレベル検出によるもの (2)
検出によりTESをホールドするもの
Fターム[5D096RR06]に分類される特許
1 - 12 / 12
音声出力装置及び音声出力方法
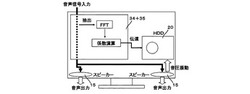
【課題】スピーカーによる振動の影響を軽減し特にハードディスクの振動軽減に適する音
声出力装置を提供する。
【解決手段】音声信号を出力するスピーカーと、前記音声信号の前記ハードディスク装置
への影響を周波数解析する解析手段とを備え、この解析手段は前記周波数解析の結果を、
前記ハードディスク装置が前記スピーカーの該音声信号の出力に先立ち前記影響を緩和す
るため働き始めるように、前記ハードディスク装置へ伝達することを特徴とする音声出力
装置。また、ハードディスク装置と音声信号を出力するスピーカーとを内蔵する音声出力
装置における音声出力方法であって、前記音声信号の前記ハードディスク装置への影響を
周波数解析し、この周波数解析の結果が、前記ハードディスク装置が前記スピーカーの該
音声信号の出力に先立ち前記影響を緩和するため働き始めるように、前記ハードディスク
装置へ伝達されることを特徴とする音声出力方法。
(もっと読む)
ディスク・ドライブ及びヘッド位置決め制御方法

【課題】センサ出力を使用したヘッド移動機構のフィードフォワード制御において、制御システムの安定性と適応フィルタの収束性とを両立させる。
【解決手段】本形態のHDD1は、外部振動に応じて、ショック・センサ・フィードフォワード(SSFF)制御におけるフィルタの適応化を行う。適応化処理部APは、ショック・センサQの出力と位置誤差信号(PES)とを参照して、SSFFフィルタFのフィルタ係数を更新する。各フィルタ係数の更新において、その更新量はステップ・サイズ・パラメータによって決まる。適応化処理部は、このステップ・サイズ・パラメータを外部振動の大きさに従って変化させる。具体的には、ショック・センサ出力あるいはフィードフォワード出力を入力とする関数フィルタ出力の絶対値を使用する。
(もっと読む)
ディスク・ドライブ及びそのヘッドのサーボ制御方法
【課題】外部からの振動を蒙るディスク・ドライブにおいて、サーボ・システムを不安定にすることなくより正確なヘッドの位置決めを行う。
【解決手段】本発明の一実施形態のHDDのサーボ・ループは、固定ピーク周波数と可変ゲインを有する固定ピーク・フィルタ233〜235と、可変のピーク周波数及びゲインを有するアダプティブ・ピーク・フィルタ236を有する。HDDは、外部振動に応じてそれぞれのピーク・フィルタのゲインを制御すると共に、固定ピーク・フィルタ233のゲインに応じてアダプティブ・ピーク・フィルタ236のゲインを制御する。これにより、設置状況や使用環境により多様な変化を示す外部振動に対応して正確なヘッド・ポジショニングを行うと共に、サーボ・システムが不安定となることを避ける。
(もっと読む)
記録媒体駆動装置およびその制御方法
【課題】衝撃の印加後に最短時間で確実に最適な処理動作に復帰することができる記録媒体駆動装置を提供する。
【解決手段】加速度検出器35は記録媒体およびヘッドスライダに加わる加速度を検出する。加速度検出器35の検出結果から、衝撃エネルギーの大きさを特定する指標が導き出される。制御回路47は加速度検出器の検出結果に基づき記録媒体からヘッドスライダを待避させる。待避後に、制御回路47は当該指標に基づき複数種類の処理動作のうちから1以上の処理動作を選択的に実行する。待避後の処理動作は必要最小限のものに限定される。その結果、衝撃エネルギーの大きさに拘わらず待避後に共通に処理動作が実行される場合に比べて、待避後の処理動作すなわち復帰処理の時間は短縮されることができる。
(もっと読む)
ディスク・ドライブ装置及びそのサーボ制御方法
【課題】振動センサを有するディスク・ドライブ装置において、検出した振動に応じた適切なサーボ制御を行う。
【解決手段】本発明一実施形態において、HDDは、ヘッド・ポジショニングの振動補正を行う補正サーボ・モードと、振動補正を行わない通常サーボ・モードとを切り換える。HDDは、いずれかのサーボ・モードにおいてサーボ・ポジショニングを行い、測定した位置誤差信号からそのサーボ・モードにおけるサーボ・ポジショニングの精度を決定する。HDDは、他方のサーボ・モードのサーボ・ポジショニング精度を表すデータをテーブルから取得する。HDDは2つのサーボ・モードの精度を比較し、精度がより高いサーボ・モードを選択する。テーブルは、各サーボ・モードにおけるサーボ・ポジショニング精度の過去の測定結果を格納している。
(もっと読む)
磁気ディスク装置およびその制御方法
【課題】外部からの振動に起因する外乱による位置誤差の劣化を簡易に抑制することが可能な磁気ディスク装置を提供する。
【解決手段】磁気ディスク装置は、トラックフォロイング制御の期間中、ピークフィルタに新たに設定するフィルタリング特性を決定するために必要なデータを取得し(S3)、次のシーク制御の開始に伴って、ピークフィルタ35に設定すべきフィルタリング特性を決定するとともに(S4)、決定したフィルタリング特性をピークフィルタ35に設定する(S5)。
(もっと読む)
移動体用ディスク駆動装置
【課題】サーボエラーから迅速に復帰することができる移動体用ディスク駆動装置を提供する。
【解決手段】第2コイルバネ44を自由長と自由長よりも長い所定の長さとの間で変化させることにより、フローティング部20の共振周波数を変化させる第2防振機構40を備える。そして、サーボエラーが発生したことに基づいて第2防振機構40を用いて共振周波数をそれまでとは別の周波数に変化させる。共振周波数を変化させると、許容加速度が低かった周波数帯の許容加速度がそれまでよりも高くなるので、それまでと同じ振動が加えられても、外部からの振動が全周波数に渡って許容加速度以下となる可能性が高くなる。そのため、迅速にサーボエラーから復帰することが可能となる。
(もっと読む)
データ記録装置
【課題】収束の速度を高めつつも所望の性能を発揮することが可能なデータ記録装置を提供する。
【解決手段】データ記録装置において、設定更新器30に含まれる更新幅決定器31が、ディジタルフィルタ23における設定周波数fの更新幅を位置誤差信号PESの大きさに応じて決定し、設定更新器30に含まれる更新幅調整器33が、更新幅決定器31により決定された設定周波数fの更新幅を設定周波数fの大きさに応じて変更する。これにより、収束の速度を適正に保って、設定周波数fを外乱成分の周波数に的確に収束させることができる。
(もっと読む)
外乱抑圧機能を持つ位置制御方法、位置制御装置および媒体記憶装置
【課題】外乱抑圧機能を持つ位置制御装置において、外乱抑圧制御を停止することなく、ループゲインの校正を行う。
【解決手段】外乱抑圧制御のため、ループ特性が変化するフィードバックコントローラ(20)と、外乱周波数に応じた目標ゲインを格納するテーブル(32)と、開ループゲインの校正を行うゲイン校正部(34)とを有する。フィードバックコントローラのループ特性の変化に応じて、テーブルの目標ゲインを用いて、ゲイン校正する。外乱抑圧制御を中断しないで、開ループゲインを校正でき、開ループゲインを外乱に影響されず、正確に校正でき、正確な位置制御が可能となる。
(もっと読む)
ディスク装置、位置決め制御回路及びそれを用いた情報処理装置
【課題】外乱抑圧機能を持つ位置決め制御系を持つディスク装置において、早期に外乱を抑圧して、ヘッドの振動を防止する。
【解決手段】ディスク装置(20)の外乱抑圧機能を有する位置決め系(14)に、外部(50)から、既知の外乱周波数を初期値にセットするためのインターフェース回路(11−1)を設けた。直ちに、未知の外乱周波数を抑圧し、又は、既知の外乱周波数からスタートし、以降、周波数が変化しても、推定周波数は、それに追従でき、早期にヘッド(3)の振動を防止できる。
(もっと読む)
ヘッド位置制御方法、ヘッド位置制御装置およびディスク装置
【課題】ディスク装置に加わる外乱によるヘッドの位置ずれを、制御系で補正する位置制御装置において、未知の外乱周波数に適応制御する。
【解決手段】位置誤差を基準とした信号から適応則により、外部振動周波数を推定する周波数推定ブロック(24)と、この外部振動周波数を用いて、逐次、補償器(23)の定数を修正する修正テーブル(24)を設ける。このため、逐次、補償器(23)の定数が、推定角周波数に応じて修正されるため、広い範囲の外部振動周波数に対して、精度の高い追従制御が可能になる。
(もっと読む)
磁気ディスク装置の制御方法およびディスク装置
【課題】加速度センサを搭載した磁気ディスク装置の制御方法およびディスク装置に関し、加速度センサを搭載したディスク装置の外乱の補償制御を好適に行うことができるディスク装置の制御方法およびディスク装置を提供することを目的とする。
【解決手段】本発明は一軸方向の振動を検出する2つの加速度センサを離間して搭載したディスク装置の制御方法であって、2つの加速度センサの出力の極性、及び、減算値もしくは加算値が所定の条件のときには外乱補償ゲインを調整し、ヘッドアクチュエータの制御量の外乱補償を行うことを特徴とする。
(もっと読む)
1 - 12 / 12
[ Back to top ]