
Fターム[5H004KA78]の内容
フィードバック制御一般 (10,654) | 制御部 (412) | モデルマッチング法 (12)
Fターム[5H004KA78]に分類される特許
1 - 12 / 12
制御パラメータ調整装置及び制御パラメータ調整方法
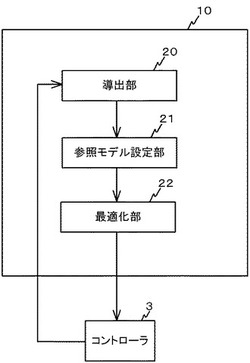
【課題】簡便で、かつ、わかりやすい形で、フィードバック制御系の制御パラメータをより望ましい状態に調整する。
【解決手段】導出部20は、PID制御系の制御パラメータを含む制御則に従う目標値と操作量と制御量との関係式に基づいて、目標値と等価であり、操作量の時系列データと制御量の時系列データとの線形結合である一般化出力を導出する。参照モデル設定部21は、目標値を入力とし制御量を出力とする参照モデルの入力に対する応答が所望のものとなるように、参照モデルの伝達関数を設定する。最適化部22は、フィードバック制御系における実際の制御量が参照モデルの出力に追従するように、最適化手法を用いて一般化出力における線形結合の各係数を調整することにより、PID制御系の制御パラメータを最適化する。
(もっと読む)
適応制御装置の設計方法

【課題】安定したプロセス制御を実現する適応制御装置の設計を速やかに行うことのできる適応制御装置の設計方法を提供することを目的とする。
【解決手段】プラント1、PI制御器3、適応制御器5の伝達関数を与える第1工程と、PI制御器3と適応制御器5とを合わせた制御系全体の伝達関数を求める第2工程と、制御対象の入力側に制御系外部から与えられる外乱を想定したときに、該外乱から出力までの伝達関数を、制御系全体の伝達関数とプラント1の伝達関数とを用いて表現する第3工程と、規範モデルを設定する第4工程と、規範モデルと第3工程で求めた伝達関数とによる部分モデルマッチングにより、PI制御器3における比例ゲイン及び積分ゲイン並びに適応制御器5の時定数を決定する第5工程とを有する適応制御装置の設計方法を提供する。
(もっと読む)
制御パラメータのチューニング方法
【課題】多変数制御系において、干渉を考慮したチューニングを可能にするとともに、チューニングに要する時間を短縮することを目的とする。
【解決手段】チャンネル毎に順番にパルス状の操作信号であるチューニング用信号を制御対象に印加し、その応答を計測し、前記チューニング用信号と前記応答とに基づいて、前記応答が参照モデルの応答に近くなるようにコントローラのPID制御パラメータを算出するようにしており、入出力データを用いて、閉ループの応答が参照モデルの応答に近くなるようにコントローラの制御パラメータを求める、VRFT(Virtual Reference Feedback Tuning)を用いて制御パラメータを算出するようにしている。
(もっと読む)
モータによる位置制御装置
【課題】
本発明は、フィードバック制御系の構造および応答に無関係に、位置および速度フィードフォワード制御系を周波数応答に基づいて、個別に調整可能となる位置制御装置を提供する。
【解決課題】
本発明は、モータの位置検出値を位置指令値に追従させることを目的としたモータによる位置制御装置において、速度規範指令値を出力する速度規範モデルと、速度制御器と、速度フィードフォワード出力信号を出力する速度フィードフォワード部と、位置規範指令値を出力する位置規範モデルと、位置制御器と、位置フィードフォワード出力信号を出力する位置フィードフォワード部と、から構成されることを特徴とする。
(もっと読む)
PID制御支援装置
【課題】PID調節器のパラメータの調節にかかる手間を軽減しつつ、複数の制御対象間で起こる干渉を考慮した制御を実現する。
【解決手段】伝達関数行列パラメータ同定手段16は、操作量MVの時系列データと、操作量MVに応じて制御対象13から出力される制御量PVの時系列データに基づいて、予め構造が設定された制御対象13を表現する伝達関数行列のパラメータを同定し、PIDパラメータ計算手段15は、伝達関数行列パラメータ同定手段16にて同定された伝達関数行列のパラメータに基づいて、制御対象13を制御するPID調節器12のパラメータを計算し、モデル予測制御パラメータ計算手段14は、伝達関数行列パラメータ同定手段16にて同定された伝達関数行列のパラメータに基づいて、PID調節器12の設定値SVPIDをモデル予測制御にて制御するパラメータを計算する。
(もっと読む)
モデル構造、制御装置、温度調節器および熱処理装置
【課題】非干渉化制御などに好適な制御対象のモデル構造、それを用いた制御装置、温度調節器および熱処理装置を提供する。
【解決手段】制御対象モデル1を、2出力z1,z2の差を、フィードバック要素Pfを介して2入力u1,u2に、正負を異ならせてそれぞれフィードバックする、すなわち、温度差(出力差)に応じて、一方から他方へ熱量(操作量)が移動するという現象に適合するモデル構造とし、このモデル構造を用いて、非干渉化器8によって、その干渉を打ち消すように構成している。
(もっと読む)
モデルベース開発におけるモデル簡易化手法
【課題】計算精度をあまり低下させることなく車両ECUに実装するモデルベースを簡易化するためのモデルベース開発におけるモデル簡易化手法を提供する。
【解決手段】予め定めた機関加速パターンに対して全部分モデルベースの部分モデルM1,M2,M3,M4毎に単位時間毎に算出される複数の値の変化量絶対値及び複数の値のうちの少なくとも二つの値の積の変化量絶対値を、それぞれ機関加速パターンにおいて積算した複数の積算値のうちの一つが部分モデル毎の判断値とされ、モデルベースにおいて算出が意図された特定値に最も影響する特定部分モデルの判断値が全ての部分モデルの判断値のうちで最大となるように判断値を選択し、判断値が大きい部分モデルほど優先順位を高く設定し、優先順位の低い部分モデルほど全部分モデルベースから省略されて、特定値の計算負荷が所望計算負荷まで低下されたモデルベースを決定する。
(もっと読む)
状態判定装置および状態判定方法
【課題】不可測な外的要因に依存して操作量の平衡点が移動する可能性のある制御対象に対しても適切な状態判定を行う。
【解決手段】状態判定装置は、制御量PVと操作量MVの時系列データについてステップ応答前半の過渡状態のデータを特定する過渡状態データ特定部3と、制御量PVと操作量MVの時系列データのうちの過渡状態のデータにより制御対象のモデル数式を同定する制御対象モデリング部4と、モデル数式に基づいて動的プロセスゲインとプロセス時定数との比率を算出するゲイン時定数比算出部5と、制御対象が特定の状態にある場合の比率の数値範囲を示す判定基準を予め記憶する判定基準記憶部6と、比率と判定基準とを比較して、制御対象の状態が特定の状態にあるか否かを判定する状態判定部7とを有する。
(もっと読む)
電動機制御装置およびそのフィルタ設定方法
【課題】 電動機制御装置のフィルタ設定において、パラメータ検討段階で実測値を活用することで最適なフィルタを効率よく設定できるようにする。
【解決手段】指令器4、制御器3、駆動力フィルタ部10、電流制御部6とを備えた電動機制御装置において、フィルタ設定部50を備え、フィルタ設定部50が、機械特性算出部11、フィルタ定数推定部33、模擬特性算出部31、実機特性確認部32とを備える。
(もっと読む)
モデル予測制御装置
【課題】 モデル予測制御装置の処理負荷を低減させること。
【解決手段】 モデル予測制御装置1は、最適操作量決定部10、内部状態推定部20及び記憶データベース30を備えるとともに、内部状態推定制御部40を備えている。内部状態推定制御部40は、所定の条件を満足した場合に、内部状態推定部20の状態推定を省略して、処理負荷を低減させる。その条件は、(1)最適操作量決定部10における最適化回数が上限を超えるほど処理負荷が大きくなった場合、又は(2)制御対象から検出される制御量の実測値が目標制御量に対してほぼ等しく安定している場合である。
(もっと読む)
信号間の関係をモデル化する装置および方法
射影は、第1の信号および第2の信号に関連付けられる。第2の信号は、第1の信号に関連付けられた第1の部分および第1の信号に関連付けられていない第2の部分を含む。射影は、少なくとも実質的に、第2の信号の第1の部分を第2の信号の第2の部分から分離する。モデルの1つまたは複数のパラメータは、射影の少なくとも一部を使用して識別される。モデルは、第1の信号、および第2の信号の第1の部分を関連付ける。  (もっと読む)
(もっと読む)
適応空気熱力学エンジンモデル
【課題】 エンジン性能の熱力学的および機械的な影響と、長期使用の部品の効率低下とを明らかにする空気熱力学エンジンモデルを提供する。
【解決手段】 複数のモデルエンジン作動パラメータと、複数の公称部品効率と、対応効率変更関数とを組み込んだ適応空気熱力学エンジンモデル20を開示する。複数のデータポイントに関して、定常状態作動時に、複数のモデルエンジン作動パラメータに対応する複数のエンジン作動パラメータを測定し、対応する効率変更関数を用いて各公称部品効率を繰返し適応させて、各モデルエンジン作動パラメータを上記測定されたエンジン作動パラメータに夫々整合させ、上記適応された公称部品効率に基づいて、実際の部品効率を推定する。推定された実際の部品効率をエンジンモデル20に入力することによって、エンジンモデル20を適応させる。
(もっと読む)
1 - 12 / 12
[ Back to top ]