
Fターム[5H004KB37]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | 単一制御対象に対し複数ループを持つもの (47)
Fターム[5H004KB37]の下位に属するFターム
内部フィードバックループを有するもの (35)
Fターム[5H004KB37]に分類される特許
1 - 12 / 12
追加型制御装置およびその制御方法
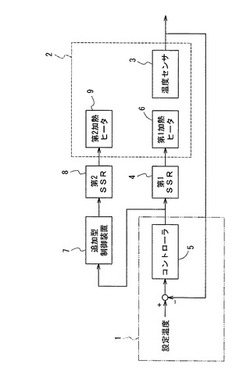
【課題】既設の主たる制御装置に、容易に追加して制御能力を向上させることができるようにする。
【解決手段】制御対象2の温度をフィードバック制御する主たる制御装置1から出力される主制御信号に基づいて、制御対象2を制御する追加制御信号を出力する追加型制御装置7であって、前記主制御信号を、前記主たる制御装置1と当該追加型制御装置7とが干渉しないように、前記追加制御信号に変換する変換手段を備え、前記変換手段は、前記主制御信号の操作量を演算して、該操作量に予め対応付けられた操作量の前記追加御信号に変換する。
(もっと読む)
多重系モータの制御装置及び移動体

【課題】積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供する。
【解決手段】本発明の一形態に係る多重系モータの制御装置は、速度指令と実速度との偏差に基づいて、多重系モータ51の一つの系をそれぞれ制御する、第1の制御系11と第2の制御系21とを備え、第1の制御系11は、多重系モータ51の一つの系をPI制御し、第2の制御系21は、多重系モータ51の他の一つの系をP制御する。これにより、積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供することができる。
(もっと読む)
オートチューニング実行装置および方法
【課題】マルチループ制御系において次にオートチューニングを実行すべき未実行ループを効率よく選択する。
【解決手段】オートチューニング実行装置は、制御ループ毎に設けられ、リミットサイクル方式のオートチューニング(AT)を実行するAT実行部1と、AT未実行の制御ループを記憶するAT未実行ループ登録部2と、制御ループ毎に設けられ、ループ間干渉により各制御ループに発生する制御量PVの最大変動量を検出する最大変動量検出部3と、所定の特定処理開始時点において最大変動量検出部3の検出結果とAT未実行ループ登録部2の登録内容とを参照して、最大変動量が規定条件以内でかつ最大になるAT未実行ループを特定する特定部4と、AT未実行ループが特定されたときにこの制御ループのAT実行部1に対してATを起動するよう指示するAT起動部5とを備えている。
(もっと読む)
送水温度制御装置および方法
【課題】単位生成熱量あたりのエネルギーコストが大きい機器と単位生成熱量あたりのエネルギーコストが小さい機器が混在する熱源システムにおいて、合計のエネルギーコストを低減させ、さらなる省エネを図る。
【解決手段】設定送水温度TSspの緩和に際して、単位生成熱量あたりのエネルギーコストが小さい機器よりも単位生成熱量あたりのエネルギーコストが大きい機器を優先させて、その機器の冷温水の出口温度の設定値を緩和する。例えば、冷凍機1−1を低COP機(単位生成熱量あたりのエネルギーコスト大)、冷凍機1−2を高COP機(単位生成熱量あたりのエネルギーコスト小)とした場合、冷凍機1−2(高COP機)の冷水の出口温度の設定値TS2spよりも、冷凍機1−1(低COP機)の冷水の出口温度の設定値TS1spを優先させて、緩和する。
(もっと読む)
送水温度制御装置および方法
【課題】使用するエネルギーの種別が異なる機器が混在する熱源システムにおいて、省エネを図りつつ、エネルギーを使用する場合に適用される各種の規制を回避する。
【解決手段】例えば、所定の判断基準を「現在の時刻がピーク時間帯に入っているか否か」とし、現在の時刻がピーク時間帯に入っていない場合には(ステップS104のNO)、ガス式の冷凍機(低COP機)を緩和優先機、電気式の冷凍機(高COP機)を緩和後回し機とし(ステップS105)、現在の時刻がピーク時間帯に入っている場合には(ステップS104のYES)、電気式の冷凍機(高COP機)を緩和優先機、ガス式の冷凍機(低COP機)を緩和後回し機とする。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
制御方法、温度制御方法、制御装置および温度調節器
【課題】 複数チャンネルを関連付けた制御において、特性が異なるチャンネルが存在する場合に、制御性能が悪化するのを回避する。
【解決手段】複数の各チャンネルのステップ応答波形を計測し(ステップn1)、複数の各チャンネルの最大傾きRの内の最大値を抽出し(ステップn2)、最大値の1/2を閾値として、複数のチャンネルを、最大傾きRでグループ分けできるか否か判定し(ステップn3)、グループ分けできるときには、複数チャンネルの内に特性の異なるチャンネルが存在するとして、最大傾きRが小さいグループのチャンネルの検出温度の平均温度を代表温度に変換し(ステップn4,5)、傾斜温度制御を行う。
(もっと読む)
流体温度制御装置及び方法
【課題】流量制御弁の固体差に対応でき、オーバーシュートが良好に抑制でき、負荷外乱に十分に対応できる流体温度制御装置を提供する。
【解決手段】作動流体を熱交換器で冷却水により冷却し、ランプヒータで加熱して目標温度にする。冷却水の流量制御弁の制御では、熱交換器の非線形な冷却特性を補償するテーブルと、比例弁の非線形な流量特性を補償するテーブルとの2種類のテーブルを使用する。比例弁特性を補償するテーブルは、各パルス数位置に対して、その位置から1パルス数だけ移動したときに生じる流量の変化率を定義している。比例弁特性を補償するテーブルは、比例弁の固体差を表したパラメータを適用することで、個々の比例弁の特性に適合したものになる。過渡時には、現在温度の変化速度に応じて比例弁制御を行なう。整定時には、ランプヒータの出力を所定の適正出力範囲内に収めるように比例弁を制御する。
(もっと読む)
位置決め装置
【課題】位置ずれが大きくても検出出力が最大となるように移動部材を位置決めできる位置決め装置を提供する。
【解決手段】駆動装置4によって可動範囲内を移動させられる移動部材と、移動部材が所定位置にあるときに検出出力が最大となる位置検出手段9と、検出出力が最大となるように駆動装置を制御する制御装置10とを有し、制御装置10は、検出出力を増幅する第1のアンプ22と、少なくとも検出出力が小さいときに第1のアンプ22よりも増幅率が高くなる第2のアンプ23とを備え、第2のアンプ23の出力が所定の切替閾値以下であるときは、第2のアンプ23の出力に応じて駆動装置4を制御し、第2のアンプ23の出力が所定の切替閾値より大きいときは、第1のアンプ22の出力に応じて駆動装置4を制御する。
(もっと読む)
制御装置
【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
モータ制御装置
【課題】 モータが停止状態から動作する場合の速い外乱を特別な補償器を用いることなく補償すること。
【解決手段】 負荷102に作用する外乱を推定する外乱オブザーバ110を備え、外乱オブザーバ110の推定外乱に基づいて外乱成分を打ち消すように構成されたモータ制御装置において、外乱オブザーバ110内に設けられた積分器301の初期値を設定する初期値設定手段111を設けている。
(もっと読む)
温度制御装置及び同装置のバルブ制御部
【課題】 低温の循環流体をランプヒータで加熱して流体の温度制御を行う場合、制御の応答性と精度を高める。
【解決手段】 流体循環供給系31を循環する流体は、チラー32で冷却され、熱交換器33内のランプヒータで加熱される。ランプ制御部41は、ランプ出力を制御することで、流体の温度を設定温度に制御する。バルブ制御部43は、ヒータ出力が、制御に適した出力設定範囲内に入るように、チラー通路37の流量制御弁34とバイパス通路35の流量制御弁36の混合比を調節する。更に、バルブ制御部43は、開度と流量との関係が、開度の分解能が高温域で細かく低温域で粗くなるような重み付けを線形関係に加味した関係となるように、且つ、2つの流量制御弁34、36の流量を合計した循環流量が常に一定になるように、開度と2つの弁34、36の操作量(パルス数)との対応関係を定める。
(もっと読む)
1 - 12 / 12
[ Back to top ]