
Fターム[5H004LA17]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 操作端の特性 (13)
Fターム[5H004LA17]に分類される特許
1 - 13 / 13
デジタル制御装置の設計方法および設計装置
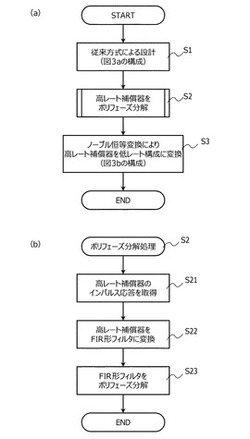
【課題】マルチレートデジタル制御装置を簡易な構成で設計する。
【解決手段】本発明にかかるデジタル制御装置の設計方法は、低レートで動作する低レート補償器と、前記低レート補償器の出力を高レートに変換するレート変換器と、高レートで動作する高レート補償器とを得る取得ステップと、前記高レート補償器をポリフェーズ分解し、該ポリフェーズ分解に対してノーブル恒等変換を用いて、第2の低レート補償器とレート変換器から構成される低レート構成に変換する変換ステップと、を含む。記変換ステップでは、前記高レート補償器のインパルス応答を求めてFIR形フィルタに変換した後に、ポリフェーズ分解を施す、ことも好ましい。
(もっと読む)
プロセス特性変化に対応できる制御方法および制御装置
【課題】塗工機の制御では、塗工量と制御信号との関係が逆転する逆転範囲が時間と共に移動するので、ブレードポジションの制御範囲を、逆転範囲を含まないように狭くせざるを得なかった。また、逆転範囲と制御範囲が重なるとオペレータが手動で操作しなければならなかった。そのための、ブレード交換の頻度が増加し、コストの増大、操業率の低下、オペレータの負担増のない技術を提供する。
【解決手段】現在および過去のプロセス量測定値と制御信号から逆転範囲に入っているかどうかを判定し、逆転範囲に入っていると、通常範囲で用いるゲインとは異なる逆転ゲインを設定し、この設定したゲインと、プロセス量設定値と測定値の差分から制御信号を演算するようにした。また、プロセスの特性を推定し、境界付近にあると制御信号を一時的に大きくして境界付近から脱出させ、この特性が変化するとその変化を補償するように制御信号を変化させるようにした。
(もっと読む)
プラントの制御装置

【課題】 フィードバック制御の制御偏差が小さいときに制御用アクチュエータの消費電力を低減するとともに、目標値が変化したときに良好な追従性能を得ることができるプラントの制御装置を提供する。
【解決手段】 プラントの制御量が目標値に一致するようにフィードバック操作量UFBを算出し、フィードバック操作量UFBを平均化することにより平均化フィードバック操作量UFBAVを算出する。プラントの作動状態に応じて保持操作量UHOLDを算出し、保持操作量UHOLDと平均化フィードバック操作量UFBAVとを設定比率KRに応じて合成し、修正保持操作量UHLDCを算出する。出力操作量UFMを一定値に保持できるときは、出力操作量UFMを修正保持操作量UHLDCに設定するとともに、フィードバック操作量UFBを修正保持操作量UHLDCに設定する。
(もっと読む)
制御装置及び制御方法
【課題】関節がギア・モータ系で構成されるマニピュレータにおける、完全に測定することができないパラメータ変動を簡易な方法により調整する。
【解決手段】マニピュレータ先端を壁などの固定部に押し当てて、力目標入力fref(N)で押し当てると、ギア・モータだけでなくリンク機構部分のばらつきも含んだ形で力出力fout(N)が出力される。それら2つの値を比較して、R(s)内部の直列ゲインをKrとしたとき、(fout/fref)×Kr=1となるようにKrを設定しR(s)を設計する。制御器内の各関節軸のR(s)すべてに反映させ、パラメータばらつきが原因のfref→foutの制御偏差を0にするように調整する。
(もっと読む)
ポンプ台数制御方法及び装置
【課題】急激な水位変動が生じても水位変動に応じて確実に各排水ポンプを運転制御し、通常時のエネルギー消費を低減するポンプ台数制御方法を提供する
【解決手段】水位に応じて複数のポンプの運転台数を制御するポンプ台数制御方法である。水位がいずれかのポンプ7の起動水位まで上昇すると、ポンプ7とこのポンプに回転動力を与える機関4との間の継手5を閉じてポンプ7を起動するとともに、水位の上昇率に基づいて、起動されたポンプ7の次に起動されるポンプ7に回転動力を与える機関4の台数が選択される。そして、この選択された台数の機関4をアイドリング状態とする。このアイドリング状態は、一定時間経過してもポンプ7が起動しない場合、アイドリングを停止する。
(もっと読む)
油圧駆動システムの制御方式
【課題】制御上の工夫によって、サーボ弁等の高価なアクチュエータを用いなくても、アクチュエータを精度よく動作させることができる制御方式を提供する。
【解決手段】空間的及び時間的に連続した連続値制御信号uを出力する主制御部11,12と、アクチュエータ2との間に、切換部14を介して選択的にフィードバック変調器20を接続する。フィードバック変調器20は、アクチュエータ2における、入力信号の受付け可能時間間隔、入力信号の取り得る離散値、及び、入出力特性に基づいた変換式によって、連続値制御信号uを空間的及び時間的に離散した離散値制御信号uQに変換する。切換部14は、連続値制御信号uの値が変調領域に入っているときにはアクチュエータ2へ離散値制御信号uPが出力され、それ以外のときは連続値制御信号uが出力されるように、接続を切り換える。
(もっと読む)
制御装置および制御方法
【課題】電流値の総和を制限する。
【解決手段】優先側上限処理部L_MH1と非優先側上限算出部C_MH2と優先側上限算出部C_MH1 とは、コントローラPID1,PID2から出力される操作量出力MV1 ,MV2 の総和が制御装置全体の操作量出力上限値MT1以下となるように抑制する。一方、総電流値算出部C_CTaは、操作量出力MV1 ,MV2に応じて2個のヒータに流れる電流値の総和である総電流値を算出し、総操作量値算出部C_MTaは、操作量出力MV1,MV2の総和である総操作量値を算出する。全体操作量出力上限値算出部C_MT1は、総電流値と総操作量値とから制御装置全体の操作量出力上限値MT1を修正する。
(もっと読む)
流体温度制御装置及び方法
【課題】流量制御弁の固体差に対応でき、オーバーシュートが良好に抑制でき、負荷外乱に十分に対応できる流体温度制御装置を提供する。
【解決手段】作動流体を熱交換器で冷却水により冷却し、ランプヒータで加熱して目標温度にする。冷却水の流量制御弁の制御では、熱交換器の非線形な冷却特性を補償するテーブルと、比例弁の非線形な流量特性を補償するテーブルとの2種類のテーブルを使用する。比例弁特性を補償するテーブルは、各パルス数位置に対して、その位置から1パルス数だけ移動したときに生じる流量の変化率を定義している。比例弁特性を補償するテーブルは、比例弁の固体差を表したパラメータを適用することで、個々の比例弁の特性に適合したものになる。過渡時には、現在温度の変化速度に応じて比例弁制御を行なう。整定時には、ランプヒータの出力を所定の適正出力範囲内に収めるように比例弁を制御する。
(もっと読む)
制御信号変換装置並びに制御装置及び制御方法
【課題】本発明は、空間的及び時間的に離散した入力信号のみが入力可能なアクチュエータに入力すべく制御信号を変換する制御信号変換装置、並びに、空間的及び時間的に連続した制御信号に基づいて前記アクチュエータを駆動し制御目標値に制御する制御装置及び制御方法を提供する。
【解決手段】本発明に係る、空間的及び時間的に離散した入力信号のみを受付け可能なアクチュエータ2を駆動し制御する制御装置1a、1bは、アクチュエータ2における、入力信号Sdの受付け可能な時間間隔、入力信号Sdの取り得る離散値、及び、入出力特性に基づいた変換式によって、空間的及び時間的に連続した制御信号Ssを入力信号Sdに変換してアクチュエータ2へ出力する制御信号変換部20を備える。
(もっと読む)
シミュレータ、シミュレーション方法、及びプログラム
【課題】電磁誘導が生じるインダクタンス素子を含む回路において、インダクタンス素子のインダクタンスの時間的変化を精度よく算出しつつ当該回路を高速にシミュレートすることができるシミュレータを提供すること。
【解決手段】コイルを含む回路及びコイルに磁気的に結合された可動部の運動をシミュレートするシミュレータは、所定の時間ステップとその前の時間ステップとの間におけるコイルへの電流値及び可動部の位置のそれぞれの差である電流変化量及び位置変化量が所定の閾値より大きいか否かを判断し、電流変化量又は位置変化量が閾値より大きい場合に所定の時間ステップにおける電流値及び可動部の位置に基づいてコイルのインダクタンスLを算出し、算出したLを記憶するとともに記憶したLを出力する。電流変化量及び位置変化量が閾値以下である場合にはLを算出させず、記憶されている前の時間ステップにおけるLを出力する。
(もっと読む)
プロセス工場向け自己診断プロセス制御ループ
適応可能プロセス制御ループを診断する方法は、プロセス制御ループ信号データを測定すること、プロセスループ信号データから複数のプロセス制御ループパラメータを生成すること、複数のプロセス制御ループパラメータの一つ又は複数から適応可能プロセス制御ループの状態を評価することを含む。プロセス制御ループデータは、適応可能プロセス制御ループがプロセス制御環境内でオンライン接続されているとき、適応可能プロセス制御ループ内の一つ又は複数のプロセス制御装置の通常動作の結果として生成される。自己診断プロセス制御ループは、プロセス制御ループの各構成部分及びプロセス制御ループ全体に対するプロセス制御ループパラメータに関する診断指標を受け取るように適応された診断ツールを含む。各診断指標は、対応する指標演算ツールにより信号データから生成される。診断ツールはさらに、診断指標の一つ又は複数からプロセス制御ループの状態を評価するようにも適応される。  (もっと読む)
(もっと読む)
調節計
【課題】 ヒータに電力を供給する電源の電圧が異なる環境下で使用しても同様に制御特性を得られるようにする。
【解決手段】 補正前の操作量と基準状態の基準操作量との比である補正係数を用いて、PIDコントローラからの操作量を補正し、これによって、実運用時の電源電圧が、基準状態の電源電圧とは異なっていても、その影響を解消するように操作量を補正し、基準状態と同様の制御特性になるようにしている。
(もっと読む)
装着式動作補助装置及び制御用プログラム
【課題】 装着者の個人差や体調等の変動要因によらず、制御方法に応じた効果を発揮することのできる装着式動作補助装置及び制御用プログラムを提供することを解決すべき課題とする。
【解決手段】 動作補助装置10では、装着者12に装着された状態において当該装着者12固有の動力学パラメータをパラメータ同定部160により同定し、該同定した動力学パラメータを代入した運動方程式に基づき制御装置100により駆動源140を制御するように構成してあるため、装着者12の個人差や体調等の変動要因によらず、制御装置100に適用される制御方法に応じた効果を発揮することができる。
(もっと読む)
1 - 13 / 13
[ Back to top ]