
Fターム[5H004MA18]の内容
フィードバック制御一般 (10,654) | 制御装置の具体的構成 (550) | 2乗演算要素 (4)
Fターム[5H004MA18]に分類される特許
1 - 4 / 4
予測装置、予測方法およびプロセス制御システム
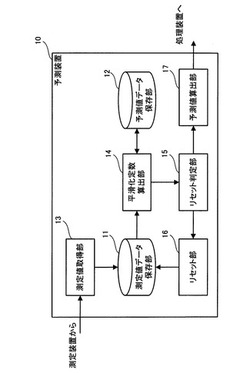
【課題】次回の処理結果の予測精度を向上させ、プロセス状態の急激な変化に迅速に追随させて制御精度を向上させる。
【解決手段】測定値取得部13によって取得された測定値データ保存部11の処理結果の測定値と、予測値データ保存部12の予測値とを用いて、平滑化定数算出部14が指数加重移動平均モデルに適用させる平滑化定数が算出され、リセット判定部15によって測定値データ保存部11のデータの削除が判定されて、データを削除する場合は、リセット部16が測定値データ保存部11の最新の測定値以外のデータを削除し、データを削除しない場合は、予測値算出部17が指数加重移動平均モデルに平滑化定数と測定値とを適用して予測値を算出するようにする。
(もっと読む)
制御装置

【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
機械特性モデル化装置、電動機制御装置、機械制御システムおよび機械特性モデル化方法
【課題】機械モデル化に誤差が生じないように摩擦を考慮できるようにする。
【解決手段】周波数特性演算装置6と、機械モデル推定手段10と、周波数特性ピーク検出手段11と、減衰推定値解析手段12とを備え、機械特性モデル7には剛体負荷モデル8と摩擦モデル9と、さらに、共振モデル18と反共振モデルと減衰モデル20とを備えた振動系モデル17を備え、最小二乗法もしくは曲線適合により周波数特性から機械モデルを求める。
(もっと読む)
伝達関数設定装置
【課題】 等しい極と零とを持たない伝達関数を一意に設定できるようにすること。
【解決手段】 行列Cの線形独立な列数が当該行列Cの列数と等しくなり、且つ、シルベスタ行列Dの線形独立な列数が当該シルベスタ行列Dの列数と等しくなるように、伝達関数G(z)の係数a1、a2、…、an、b0、b1、…、bn及び次数nを設定するようにした。そのため、行列解析を行うことで、伝達関数G(z)に等しい極と零とを持たせない係数a1、a2、…、an、b0、b1、…、bn及び次数nを設定することができる。それゆえ、例えば、行列Cの解析等で係数や次数を設定して伝達関数G(z)を設定した後に、その設定した伝達関数G(z)の極と零とを複素平面にプロットし、等しいと判断できる極と零とを恣意的に取り除かせる方法とは異なり、等しい極と零とを持たない伝達関数G(z)を一意に設定することができる。
(もっと読む)
1 - 4 / 4
[ Back to top ]