
Fターム[5H115SF05]の内容
車両の電気的な推進・制動 (204,712) | 車両の制御 (610) | 速度制御 (326) | パターンを用いるもの (97)
Fターム[5H115SF05]に分類される特許
81 - 97 / 97
ハイブリッド車両の内燃機関制御装置及び方法
【課題】 ハイブリッド車両において内燃機関を効率良く動作させる。
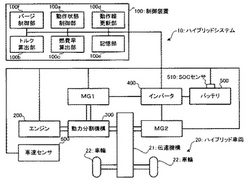
【解決手段】 ハイブリッドシステム10において、トルク算出部100bはモータジェネレータMG1のトルク反力からエンジン200のトルクを算出する。また、燃費率算出部100cは、係る算出されたエンジントルクと、燃料噴射量及びエンジン回転数とに基づいて、エンジン200における瞬間的な燃料消費率を算出する。動作線更新部100dは、この算出された燃料消費率に基づいて動作点学習処理を実行し動作線を更新する。この際、動作線更新部100dは、エンジン200がパージ中である場合にはパージ量を考慮して燃料消費率を算出し、動作線の更新を行う。
(もっと読む)
ハイブリッド車両の内燃機関制御装置及び方法

【課題】 ハイブリッド車両を効率良く動作させる。
【解決手段】 ハイブリッドシステム10において、トルク算出部100bはモータジェネレータMG1のトルク反力からエンジン200のトルクを算出する。また、燃費率算出部100cは、係る算出されたエンジントルクと、燃料噴射量及びエンジン回転数とに基づいて、エンジン200における瞬間的な燃料消費率を算出する。動作線更新部100dは、この算出された燃料消費率に基づいて動作線更新処理を実行し動作線を更新する。
この際、学習範囲設定部100fは、動作線更新処理において設定される燃費率の学習範囲をハイブリッド車両20の車速、或いは騒音又は振動の状態に応じて変化させる。
(もっと読む)
ハイブリッド車両の内燃機関制御装置及び方法
【課題】 ハイブリッド車両において、快適性や環境性能を含めた総合的な性能を向上させる。
【解決手段】 ハイブリッドシステム10において、トルク算出部100bはモータジェネレータMG1のトルク反力からエンジン200のトルクを算出する。また、燃費率算出部100cは、係る算出されたエンジントルクと、燃料噴射量及びエンジン回転数とに基づいて、エンジン200における瞬間的な燃料消費率を算出する。動作線更新部100dは、この算出された燃料消費率に基づいて動作点学習処理を実行し動作線を更新する。この際、動作線更新部100dは、NOxの排出量が所定値以上である動作点を、動作線の更新対象から除外し、動作線を、NOxの排出量が所定値未満となる範囲で更新する。
(もっと読む)
ハイブリッド車両の内燃機関制御装置及び方法
【課題】 ハイブリッド車両を効率良く動作させる。
【解決手段】 ハイブリッドシステム10において、トルク算出部100bはモータジェネレータMG1のトルク反力からエンジン200のトルクを算出する。また、燃費率算出部100cは、係る算出されたエンジントルクと、燃料噴射量及びエンジン回転数とに基づいて、エンジン200における瞬間的な燃料消費率を算出する。動作線更新部100dは、この算出された燃料消費率に基づいて動作点学習処理を実行し動作線を更新する。動作点設定部100fは、通常この動作線上で動作点を設定するが、要求駆動力が、車速と要求駆動力との関係を表す制御マップ31上でエネルギ再循環が発生するとされる領域に存在する場合には、エンジン200の動作点を、駆動系の効率を含めたシステム効率が最大となる動作点に設定する。
(もっと読む)
車両のモータトラクション制御装置
【課題】駆動スリップが開始したのと同時に前後力に横力を加味して路面摩擦係数を精度良く推定することで、路面摩擦係数情報を用いた精度の高いスリップ制御を実現できる車両のモータトラクション制御装置を提供する。
【解決手段】駆動輪を駆動する動力源に装備された少なくとも1つのモータを備えた車両のモータトラクション制御装置において、前記モータトラクション制御手段は、スリップ開始判定時のスリップ開始トルク相当値を検出するスリップ開始トルク相当値検出手段(ステップS12〜ステップS14)と、スリップ開始判定時のスリップ開始旋回相当値を検出するスリップ開始旋回相当値検出手段(ステップS15)と、前記スリップ開始トルク相当値による前後力とスリップ開始旋回相当値による横力に応じて路面摩擦係数を推定する路面摩擦係数推定手段(ステップS16〜ステップS18)と、を有する手段とした。
(もっと読む)
列車停止制御装置
【課題】 本発明は、軌道回路毎に最高位のATC信号で定められた規定の速度パターンを変えず、また進入速度にかかわらず、余裕距離を所定の距離になるように制動開始を制御し、既存の構成を変えることなく構築できるために簡単な構成でかつ安価に、列車運行効率を向上できる。
【解決手段】 本発明の列車停止制御装置は、地上装置から停止信号を含むATC信号を受信器により受信したとき、軌道回路進入時の進入速度と自列車の空走時間により空走距離を算出する。また、検出した軌道回路進入時の進入速度と軌道回路識別子に基づいて規定の減速度により実制動距離を算出する。更に、算出した空走距離と実制動距離と所定の余裕距離の総和を、軌道回路長から減算して、自列車が軌道回路に進入した後制動を開始するまでの距離である補正距離を算出して当該補正距離を加味させて補正した速度パターンに従って列車の速度を制御して自列車を停止させる。
(もっと読む)
車両のモータトラクション制御装置
【課題】モータトラクション制御中に、制御切り替えに伴う路面摩擦係数推定値の切り替えにもかかわらず、シームレスなモータトルク指令値の設定により車両挙動の安定性を確保することができる車両のモータトラクション制御装置を提供する。
【解決手段】駆動輪を駆動する動力源に装備された少なくとも1つのモータを備えた車両のモータトラクション制御装置において、第1スリップ制御部に対応する第1路面摩擦係数相当値を推定する第1路面摩擦係数相当値推定手段と、前記第1スリップ制御部とは観点の異なる第2スリップ制御部に対応する第2路面摩擦係数相当値を推定する第2路面摩擦係数相当値推定手段とを有し、第1スリップ制御部と第2スリップ制御部との切り替え時、第1路面摩擦係数相当値と第2路面摩擦係数相当値のうち、切り替え前の値から切り替え後の値へ徐々に変化する路面摩擦係数相当値を用いてモータトルク指令値を設定する。
(もっと読む)
車両のモータトラクション制御装置
【課題】 駆動スリップが開始したのと同時に路面摩擦係数を推定することで、路面摩擦係数情報を用いた精度の高いスリップ制御を実現できる車両のモータトラクション制御装置を提供すること。
【解決手段】 駆動輪を駆動する動力源に装備された少なくとも1つのモータと、駆動輪の駆動スリップを検出し、モータトルクダウン制御により駆動輪のグリップを回復させるモータトラクション制御手段と、を備えた車両のモータトラクション制御装置において、前記モータトラクション制御手段は、スリップ開始判定時のスリップ開始トルク相当値を検出するスリップ開始トルク相当値検出手段(ステップS12〜ステップS14)と、前記スリップ開始トルク相当値検出手段からのスリップ開始トルク相当値に応じて路面摩擦係数を推定する路面摩擦係数推定手段(ステップS15)と、を有する手段とした。
(もっと読む)
燃料電池システム
【課題】 運転時における快適性を維持することが可能な燃料電池システムを提供する。
【解決手段】 燃料電池システムは、車速センサ16により検出された車速が低くなるに応じて燃料電池スタック1における空気利用率が高くなるように、空気利用率を決定する。このため、車速が低い場合に空気利用率が高くなって燃料電池スタック1への空気の供給量を少なくすることとなる。この結果、コンプレッサ2は高速回転の必要がなくなり、コンプレッサ2からの音は走行に関する騒音よりも目立ちにくくなる。
(もっと読む)
鉄道車両
【課題】鉄道車両の運行時において、走行パターンもしくは減速パターンから、走行中もしくは減速時に得られる回生エネルギーを予測し、その回生エネルギーを有効に使用することで列車を高効率に運転するシステムを提供すること。
【解決手段】エンジンで発電し、インバータを駆動することで走行する鉄道車両システムに、エネルギー蓄積装置を加えることで、回生エネルギーをエネルギー蓄積装置に貯蔵するとともに、エネルギー蓄積装置が、状況に応じて充放電を行うことによりエンジンを一定に動かすことができる。これにより、高効率な運転が可能となる。
(もっと読む)
電動自動車の電力供給装置
【課題】高電圧電源が故障したときでも制動モータなどに電力を供給して車両の制御を継続することのできる電動自動車の電力供給装置を提供する。
【解決手段】電動自動車の電力供給装置1では、高電圧電源2の故障を制御回路10が検知すると、第1及び第2のスイッチ5、6を開放し、第1の電源回路7が走行モータ用駆動装置3からの回生電力によって、制動モータを駆動するための電力を生成して制動モータ用駆動装置4に供給し、電動自動車が所定速度以下になって回生電力が小さくなると、第2の電源回路8が電荷蓄積装置9からの電力によって制動モータを駆動するための電力を生成し、制動モータ用駆動装置4に供給することを特徴とする。
(もっと読む)
車両の定位置停止自動制御装置
【課題】停止位置精度を確保した状態で、ブレーキノッチの切換回数を低減する。
【解決手段】 現在の車両状態データを取得する車両状態データ取得手段8と、各ブレーキノッチにおける車両のブレーキ特性データを記憶保持するブレーキ特性データ保持部10と、取得した車両状態データと保持されているブレーキ特性データに基づき、現在速度での現在ブレーキノッチから各ブレーキノッチに切換えた時の現在位置から停止位置までの距離を示す各減速距離を演算する減速距離演算手段12と、演算した各ブレーキノッチでの減速距離と目標停止位置とに基づいて選択したブレーキノッチをブレーキ制御指令と決定するブレーキ制御指令決定手段13と、決定されたブレーキ制御指令をブレーキ装置に出力するブレーキ制御指令出力手段14とを備えている。
(もっと読む)
自動車およびその制御方法並びに駆動装置およびその制御方法
【課題】 高速安定走行している最中の乗り心地の向上を図る。
【解決手段】 ハイブリッド自動車の平均車速Aveが比較的高かったり、高速道路を走行している最中のときには(S132,S134)、比較的高速で安定して走行する高速安定走行を行なうと予測し、モータに取り付けられた変速機の最増速段から下段への変更が通常時より行なわれ難いように設定された高速走行時設定用マップを用いて目標ギヤ状態G*を設定し(S138)、変速機の変速状態が設定された目標ギヤ状態G*となるよう変速機を制御する。この結果、高速安定走行が予測されたときには変速機の最増速段から下段への変更が行なわれ難くなり、変速段の変更に伴う変速ショックを抑制して乗り心地を向上させることができる。
(もっと読む)
車両用動力伝達装置
【課題】 電気的な無段変速機として作動可能な差動機構を有する車両において燃費を可及的に向上させる動力伝達装置を提供する。
【解決手段】 差動部12による電気的無段変速部の変速比が可変状態である場合には、予め関係記憶手段58に記憶された第1変速制御マップ66に基づいて自動変速部20の変速制御を行うと共に、電気的無段変速部の変速比が固定されている場合には、予め関係記憶手段58に記憶された第2変速制御マップ68に基づいて自動変速部20の変速制御を行う有段変速制御手段56を含むことから、電気的無段変速部の状態に応じて自動変速部20の変速比を変更することができ、動力伝達装置全体の燃費の最適化を図ることができる。
(もっと読む)
ハイブリッド車両及びその制御方法
【課題】大幅に増大された燃料経済と低減された汚損物質の排出とを実現する、改良されたハイブリッド電気車両を提供する。
【解決手段】 内燃機関と、内燃機関を始動可能である第一の電動モータと、車輪にトルクを印加するための電動モータとしてまた車輪からトルクを受け発電機として作動可能である第二の電動モータと、第一及び第二の電動モータに電流を供給し、少なくとも第二の電動モータから充電電流を受ける電池バンクと、内燃機関並びに第一及び第二の電動モータと車輪との間の電気的及び機械的動力の流れを制御するための制御装置とを具備し、車両を推進させるために、もしくは車両を推進させ及び/または電池バンクを充電するために第一及び第二の電動モータの一方または両方を駆動させるために、内燃機関によって発生させられるトルクが、効率的に発生させられる設定値に等しい場合に、制御装置が内燃機関を始動及び作動させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 メモリ容量を必要とすることなくモードチャッタリングを回避可能な車両の制御装置を提供すること。
【解決手段】 複数の走行モードが設定された最適モードマップから、運転点に応じた最適なモードを選択するモード選択手段を備えた車両の制御装置において、前記最適モードマップにおけるモード遷移の発生を検出するモード遷移検出手段と、前記モード遷移検出手段によりモード遷移の発生が検出された時は、遷移前の走行モードを所定時間保持するモード保持手段とを設けた。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】 目的地までの経路の道路状況に応じて燃料消費量が最少となるエンジンとモーターの運転スケジュールを設定する。
【解決手段】 発進と停止が予測される地点で目的地までの経路を複数の区間に区分し、目的地までの経路の道路状況と運転者の運転履歴とに基づいて各区間ごとに車速パターンを推定し、車速パターンとエンジンの燃料消費特性とに基づいて、目的地までの燃料消費量が最少となるように各区間ごとのエンジンとモーターの運転スケジュールを設定するようにした。これにより、定常走行時のみならず、車両の減速および制動時のエネルギー回収による燃費改善と、加速時の燃費増加とを考慮して、目的地までの経路の道路状況と運転者の運転履歴に応じた正確な燃料消費量を求めることができ、燃料消費量が最少となるエンジンとモーターの運転スケジュールを設定することができる。
(もっと読む)
81 - 97 / 97
[ Back to top ]